🔒 Safety-certifiable Multi-Sensor Fusion for Robotic Navigation in Urban Scenes
Safety-certifiable AI for autonomous navigation, AI-enabled multi-sensor fusion (LiDAR/Camera/IMU/GNSS), integrity monitoring and navigation-control joint optimization. Our research focuses on developing fusion algorithms that not only achieve high accuracy but also provide safety guarantees and integrity monitoring for safety-critical autonomous systems.
Projects (3)
Safety-certified Multi-source Fusion Positioning for Autonomous Vehicles in Complex Scenarios
February 16, 2025
Innovation and Technology Commission
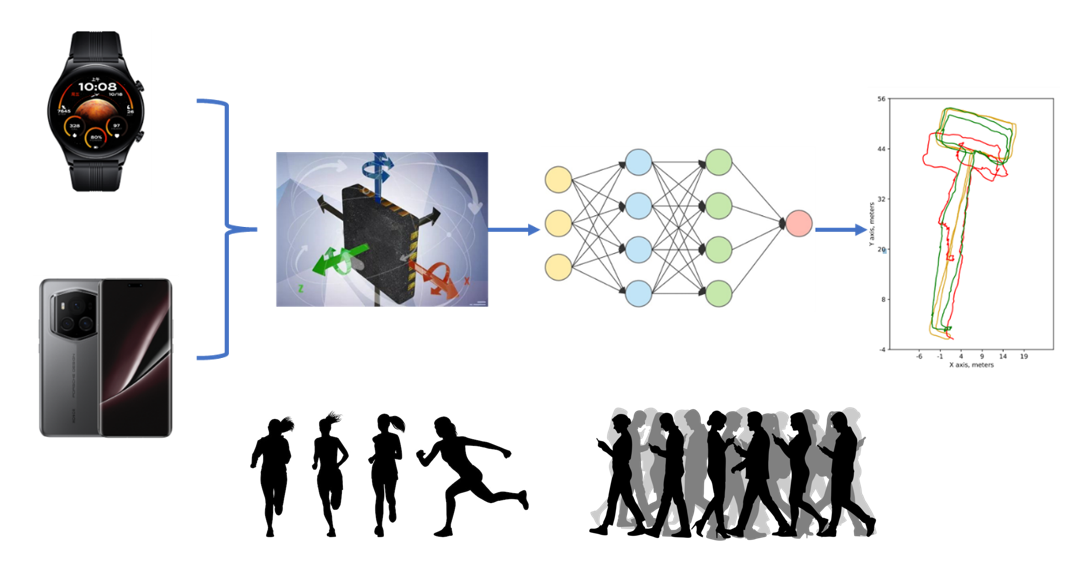
AI assisted inertial navigation system
October 14, 2024
This project aims to develop a deep learning-based inertial navigation algorithm that utilizes accelerometer, gyroscope, and magnetometer data from smart wearables and smartphones to infer the user’s position and movement trajectory, while providing corresponding confidence levels