Projects
2024
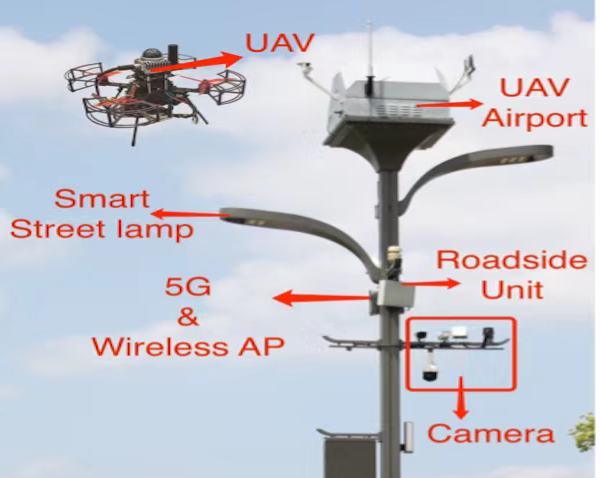
Develop a comprehensive UAV perception and Perching solution, focusing on the integration of smart streetlight poles with a UAV takeoff, landing, and battery exchange platform
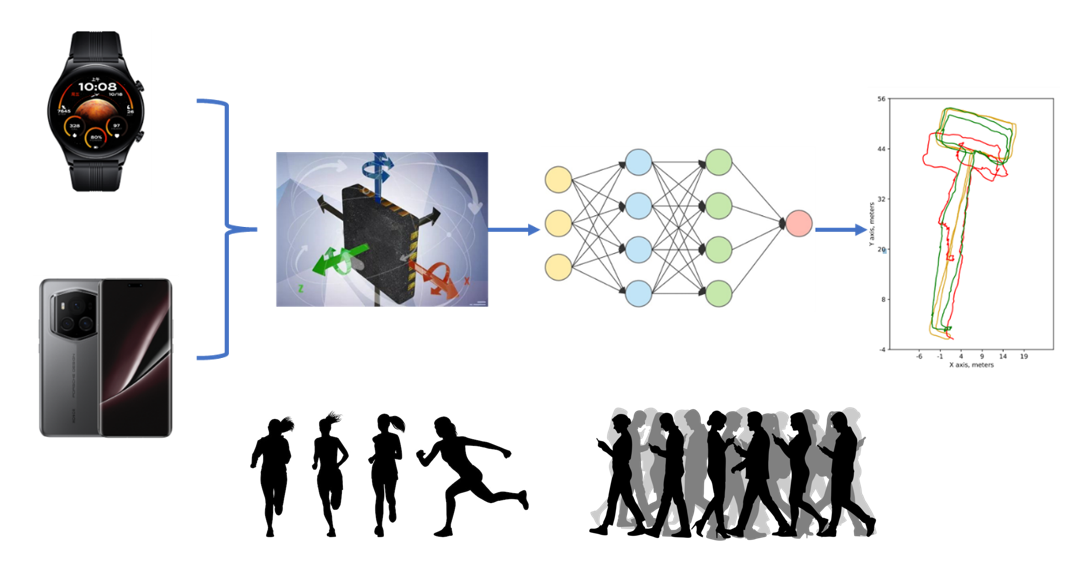
Introduction Inertial odometry is a critical technology used in various applications, from robotics and autonomous vehicles to augmented reality (AR) and wearable devices. It involves estimating the position and orientation of an object over time using data from inertial measurement units (IMUs), which typically include accelerometers and gyroscopes. However, traditional inertial odometry systems often face challenges such as sensor noise, bias, and drift, which can lead to cumulative errors and reduced accuracy over time. To address these challenges, AI-aided inertial odometry has emerged as a promising solution, leveraging the power of artificial intelligence to enhance the performance and reliability of inertial navigation systems. By integrating AI techniques such as machine learning and sensor fusion, these systems can intelligently process and interpret IMU data, correcting for errors and improving overall accuracy. AI-aided inertial odometry systems can learn from patterns in sensor data, adapt to different environments, and integrate information from multiple sources, such as cameras and GPS, to provide more robust and precise motion tracking. This advancement not only mitigates the limitations of traditional inertial systems but also opens up new possibilities for applications in complex and dynamic environments where traditional methods may fall short. As AI continues to evolve, its integration with inertial odometry is expected to drive significant innovations across various fields, enhancing the capabilities of autonomous systems and enriching user experiences in wearable devices. This project aims to develop a deep learning-based inertial navigation algorithm that utilizes accelerometer, gyroscope, and magnetometer data from smart wearables and smartphones to infer the user’s position and movement trajectory, while providing corresponding confidence levels.
Transport Department
PolyU (UGC)

PolyU (UGC)
PolyU (UGC)
PolyU (UGC)
2023
RCDSE, PolyU
PolyU (UGC)
Tencent Dadi Tongtu (Beijing) Technology Co., Ltd 騰訊大地通途北京科技有限公司
RIAM, PolyU

Meituan (Collaborative)/深圳市美團機器人研究院
PolyU (UGC)
2022
Department of Science and Technology of Guangdong Province (GDSTC) 廣東省科學技術廳
2021
Abstract