Projects
2025
Innovation and Technology Commission

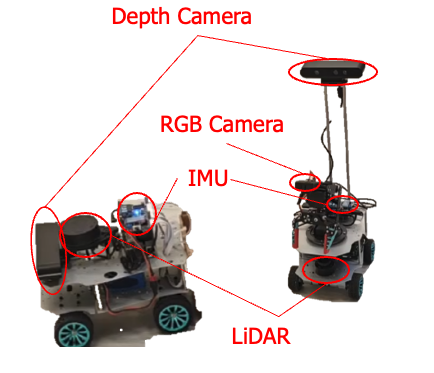
Demonstration of our Autonomous Driving Vehicles and their onboard sensor platforms.
2024
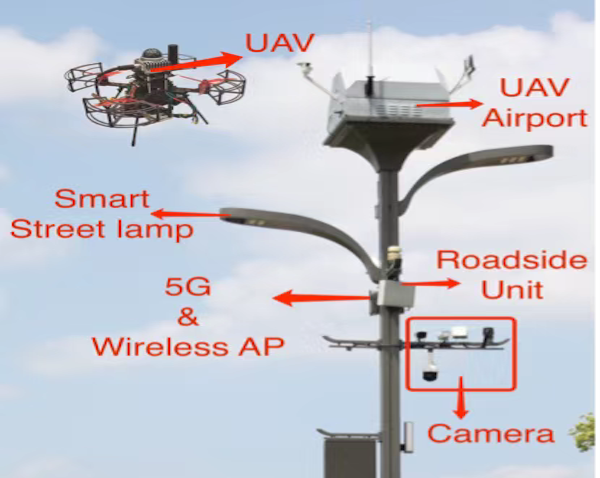
Develop a comprehensive UAV perception and Perching solution, focusing on the integration of smart streetlight poles with a UAV takeoff, landing, and battery exchange platform
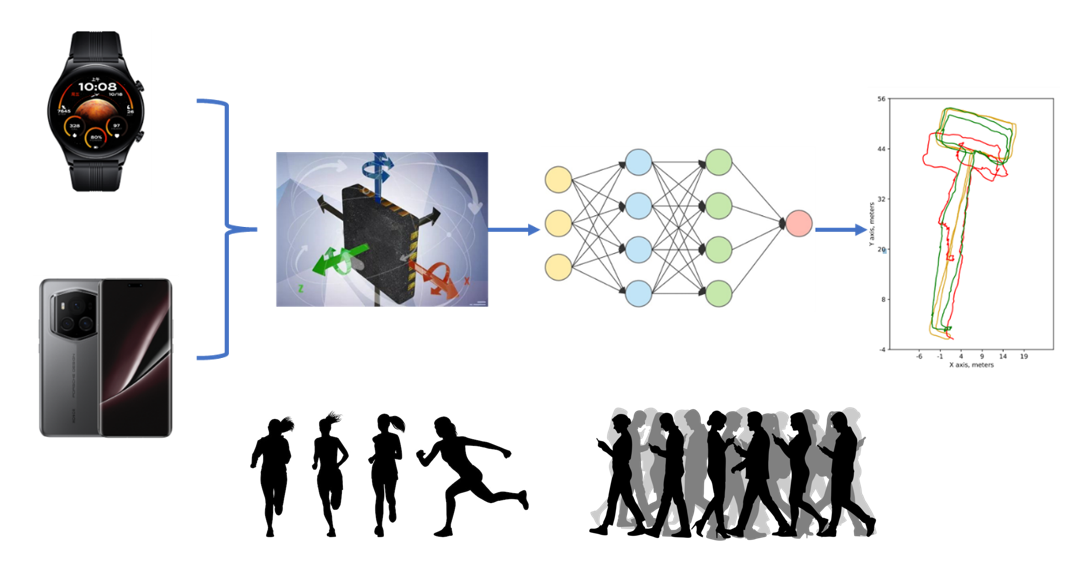
This project aims to develop a deep learning-based inertial navigation algorithm that utilizes accelerometer, gyroscope, and magnetometer data from smart wearables and smartphones to infer the user’s position and movement trajectory, while providing corresponding confidence levels
PolyU (UGC)

Abstract
2023
Abstract
PolyU (UGC)
PolyU (UGC)
2022
2021
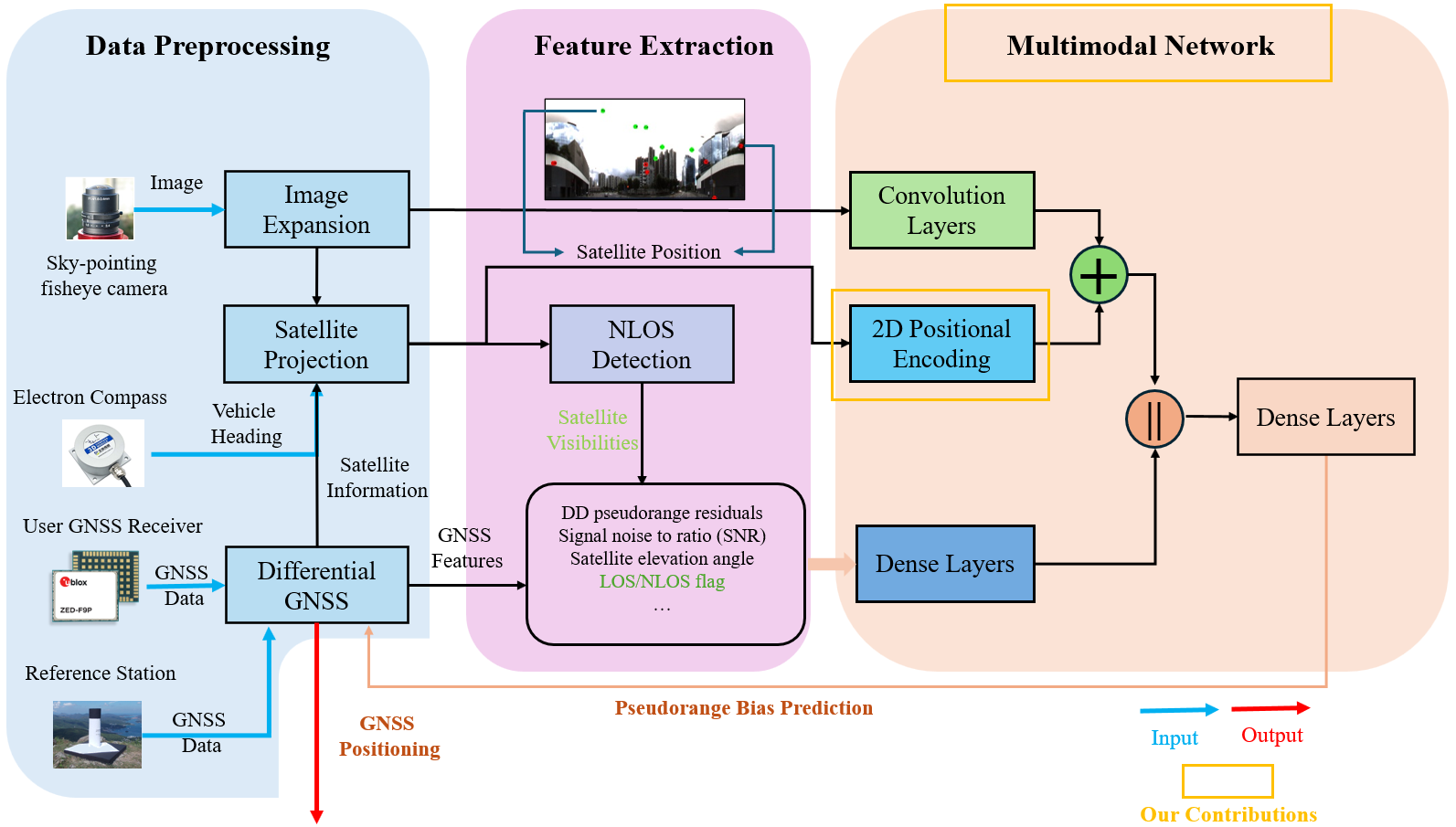
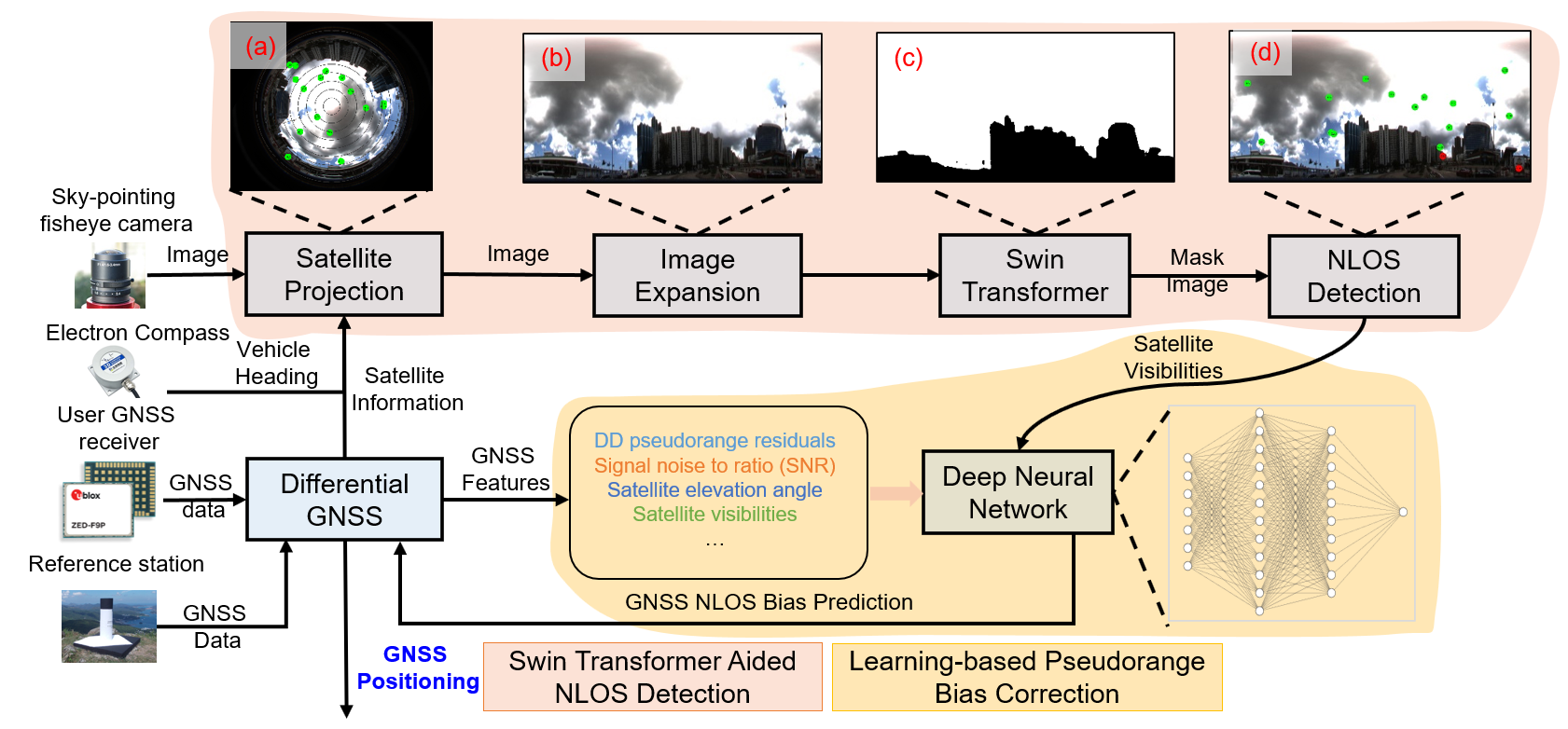
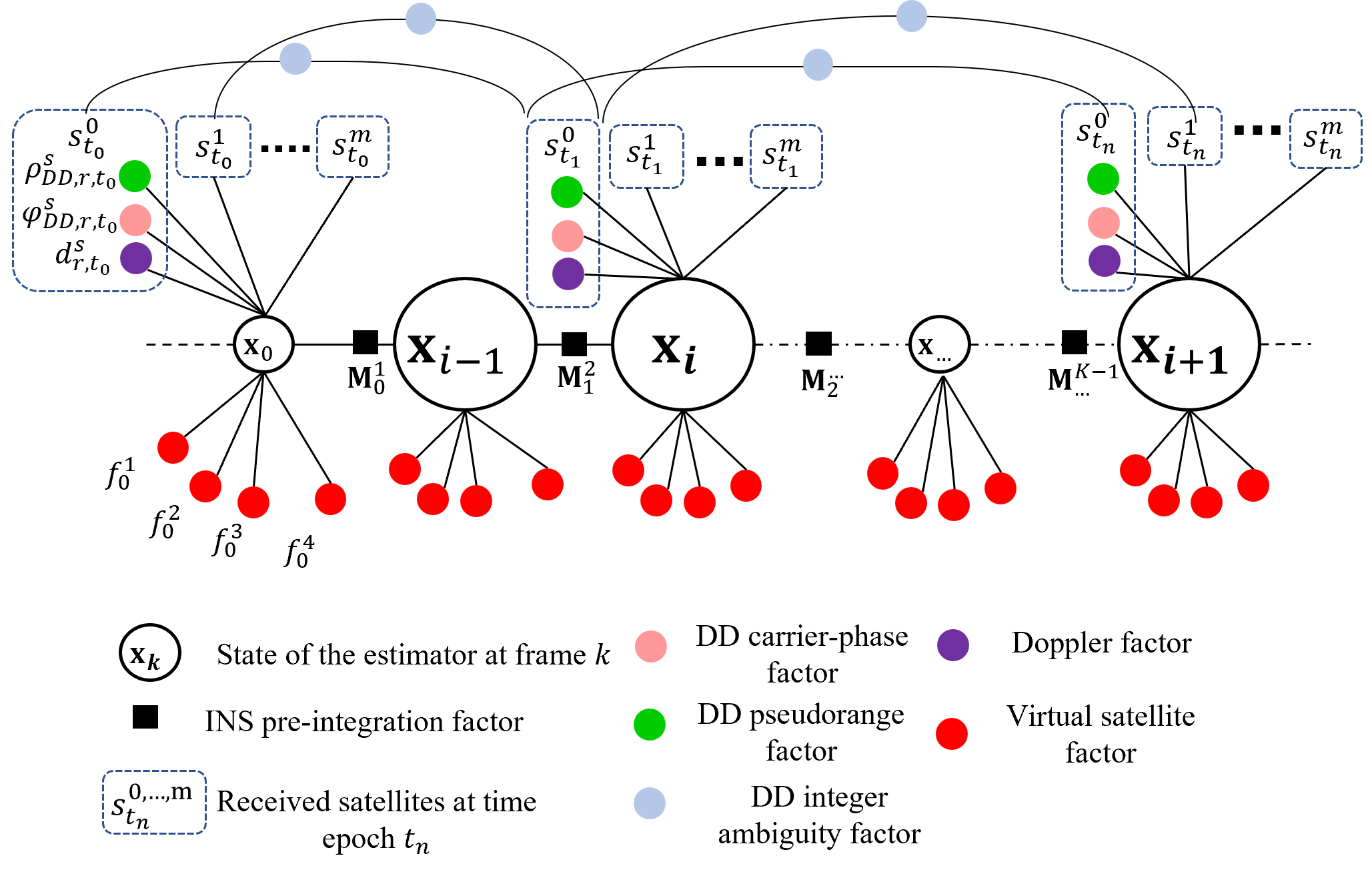
Developed LiDAR aided GNSS-RTK method based on the GNSS/IMU/LiDAR to provide highly accurate positioning results in the urban canyons.