🚁 Embodied Drones for City Maintenance and Manipulation
Intelligent drones and UAV swarm systems, aerial manipulation for urban infrastructure, software-hardware co-design for efficient embodied AI drone systems. Our research develops autonomous drone platforms capable of performing complex manipulation and inspection tasks in urban environments, from window cleaning to infrastructure monitoring.
Projects (5)
Reliable UAV Perception and Perching Solutions in Urban Streets
December 09, 2024
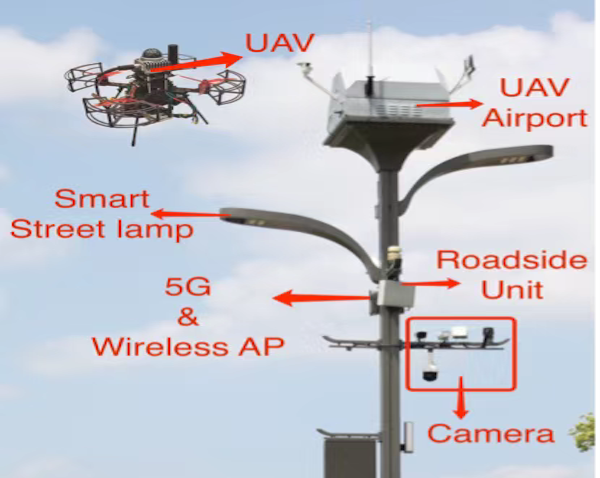
Develop a comprehensive UAV perception and Perching solution, focusing on the integration of smart streetlight poles with a UAV takeoff, landing, and battery exchange platform
Safe-assured Learning-based Deep SE(3) Motion Joint Planning and Control for Unmanned Aerial Vehicles
April 08, 2024
PolyU (UGC)

Safety-certifiable UAV System for Terrian and Civil Infrastructure Inspection
January 01, 2023
PolyU (UGC)