Embodied AI for Robotics Education
← Back to all Research Directions
Abstract
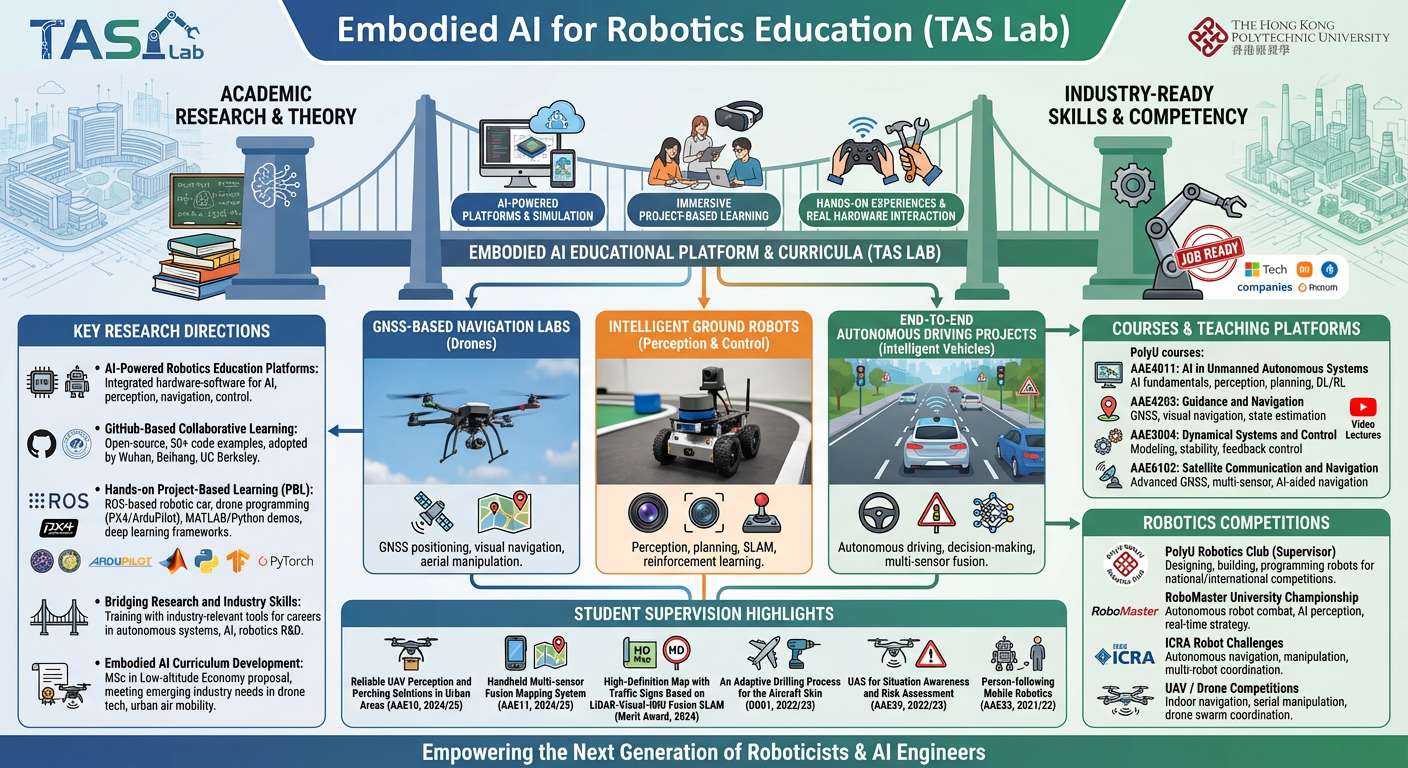
At the TAS Lab, we believe that cutting-edge research should go hand-in-hand with innovative education. Our research in Embodied AI for Robotics Education focuses on developing AI-powered educational platforms and hands-on learning experiences that bridge the gap between academic research and industry-ready skills. We leverage our expertise in autonomous systems — including drones, ground robots, and intelligent vehicles — to create immersive, project-based curricula that empower the next generation of roboticists and AI engineers.
Our educational research integrates embodied AI concepts into university courses and outreach programs, enabling students to interact with real robotic hardware and state-of-the-art AI algorithms. From GNSS-based navigation labs to end-to-end autonomous driving projects, we design curricula that combine theoretical foundations with practical implementations, fostering both deep understanding and engineering competency.
Key Research Directions
- AI-Powered Robotics Education Platforms — Developing integrated hardware-software platforms for teaching AI, perception, navigation, and control using real drones, ground robots, and autonomous vehicles.
- GitHub-Based Collaborative Learning — Pioneering open-source, GitHub-based pedagogical approaches with 50+ code examples that have been adopted by universities worldwide, including Wuhan University, Beihang University, and UC Berkeley.
- Hands-on Project-Based Learning (PBL) — Designing curricula around ROS-based robotic car projects, drone programming workshops (PX4/ArduPilot), MATLAB/Python demonstrations, and deep learning framework integration.
- Bridging Research and Industry Skills — Training students with industry-relevant tools and platforms, preparing them for careers in autonomous systems, AI engineering, and robotics R&D.
- Embodied AI Curriculum Development — As Associate Programme Leader, Dr. Wen drafted the MSc in Low-altitude Economy proposal to meet emerging industry needs in drone technology and urban air mobility.
Courses and Teaching Platforms
Our education research is tightly integrated with the following courses at The Hong Kong Polytechnic University:
- AAE4011 — Artificial Intelligence in Unmanned Autonomous Systems: Covers AI fundamentals for autonomous drones and ground robots, including perception, planning, and decision-making using deep learning and reinforcement learning.
- AAE4203 — Guidance and Navigation: GNSS positioning (SPP, DGNSS, RTK), visual navigation, state estimation using Kalman filtering and factor graph optimization. Features video lectures and hands-on tutorials.
- AAE3004 — Dynamical Systems and Control: Fundamentals of dynamical systems modeling, stability analysis, and feedback control design for aerospace and robotics applications.
- AAE6102 — Satellite Communication and Navigation (Invited Lecture): Advanced GNSS positioning techniques, multi-sensor integration, and AI-aided navigation in urban environments.
Video Lectures
AAE4203 Guidance and Navigation — Lecture Series on YouTube
Robotics Competitions
TAS Lab actively supports and supervises students in robotics competitions, providing mentorship, technical resources, and hands-on training. Competitions are a vital platform for students to apply their theoretical knowledge, develop teamwork skills, and push the boundaries of autonomous systems engineering.
- PolyU Robotics Club (Supervisor) — Dr. Wen serves as the faculty supervisor of the PolyU Robotics Club, guiding students in designing, building, and programming robots for national and international competitions. The club brings together students from diverse engineering disciplines to collaborate on cutting-edge robotics projects.
- RoboMaster University Championship — TAS Lab mentors student teams competing in the DJI RoboMaster competition, one of the world's most prestigious university robotics contests, involving autonomous robot combat, AI-based perception, and real-time strategy.
- ICRA Robot Challenges — Supporting student participation in IEEE ICRA robot challenges, including autonomous navigation, manipulation, and multi-robot coordination tasks.
- UAV / Drone Competitions — Supervising teams in autonomous UAV challenges, including indoor navigation, aerial manipulation, and drone swarm coordination, leveraging TAS Lab's expertise in embodied AI for drones.
- Interdisciplinary Training — Competition preparation involves cross-training in mechanical design, embedded systems, computer vision, SLAM, and reinforcement learning, providing students with a comprehensive skill set for careers in robotics and AI.
Student Supervision Highlights
- Reliable UAV Perception and Perching Solutions in Urban Areas — ZHAO Jiaqi, LI Mingjue To, FU Chenlei (AAE10, 2024/25)
- Handheld Multi-sensor Fusion Mapping System — QIN Qijun, WANG Yuteng (AAE11, 2024/25)
- High-Definition Map with Traffic Signs Based on LiDAR-Visual-IMU Fusion SLAM — QIN Qijun (Merit Award, Best URIS Research Project 2024)
- An Adaptive Drilling Process for the Aircraft Skin — LAU Chun Ho, LEUNG Cheuk To, CHAN Hei Lam Joshua (DD01, 2022/23)
- UAS for Situation Awareness and Risk Assessment — LAM Yat Long, CHEN Yat Nam (AAE39, 2022/23)
- Person-following Mobile Robotics — MOHAMMAD Tamz (AAE33, 2021/22)
Acknowledgement and Collaborators
Our robotics education initiatives are supported by The Hong Kong Polytechnic University, the Department of Aeronautical and Aviation Engineering, and the Faculty of Engineering. We are grateful to our collaborators at Wuhan University, Beihang University, UC Berkeley, and industry partners for adopting and contributing to our open-source educational resources.
