🛰️ 3D LiDAR Aided GNSS Positioning for Robotics Navigation
AI-driven GNSS positioning (RTK, PPP, PPP-RTK), 3D LiDAR aided NLOS/multipath mitigation, multi-sensor fusion for robust urban navigation. Our research develops advanced algorithms that integrate GNSS with 3D LiDAR and other sensors to achieve high-accuracy positioning in challenging urban environments where satellite signals are degraded by buildings and other obstacles.
Projects (6)
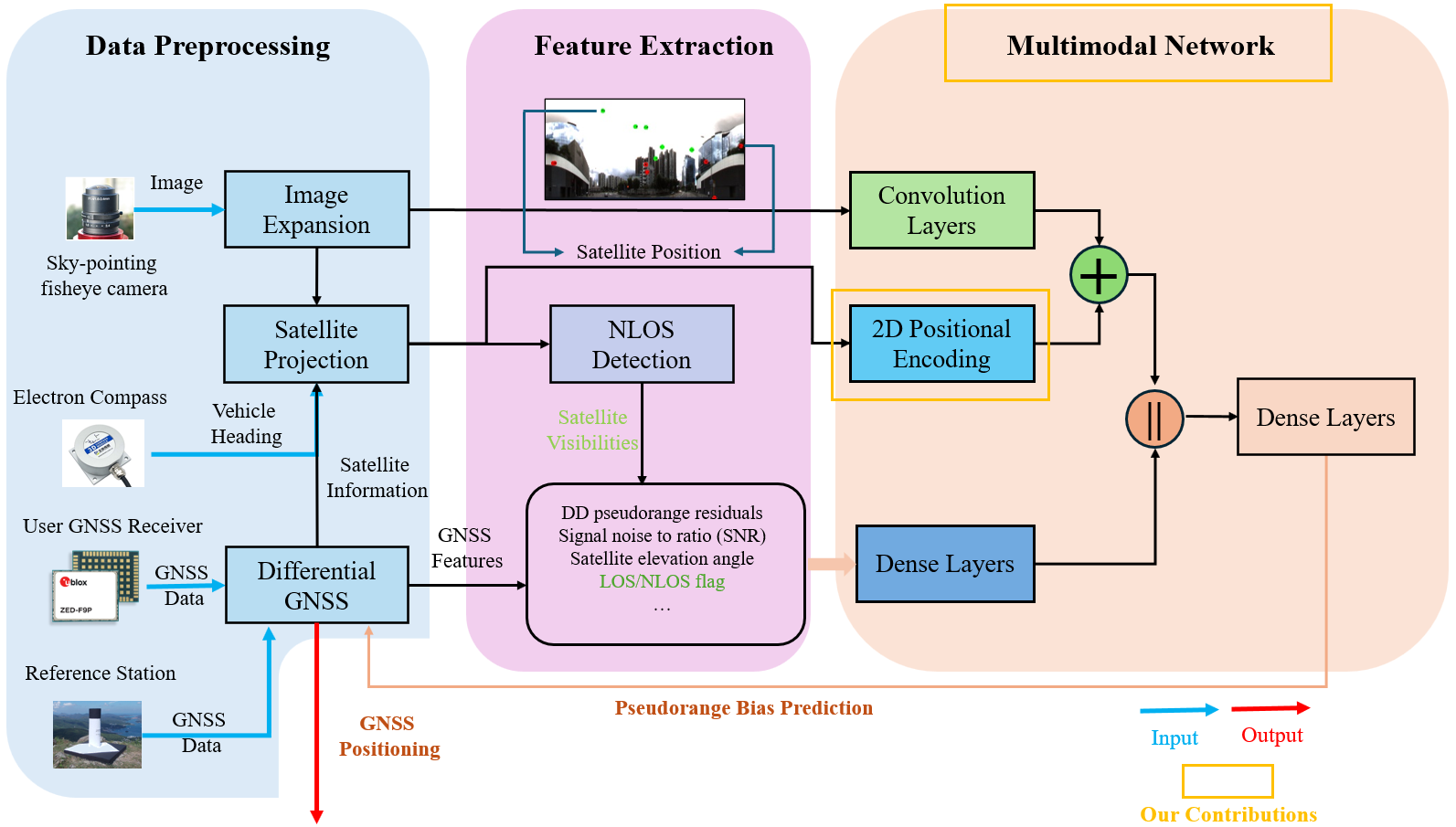
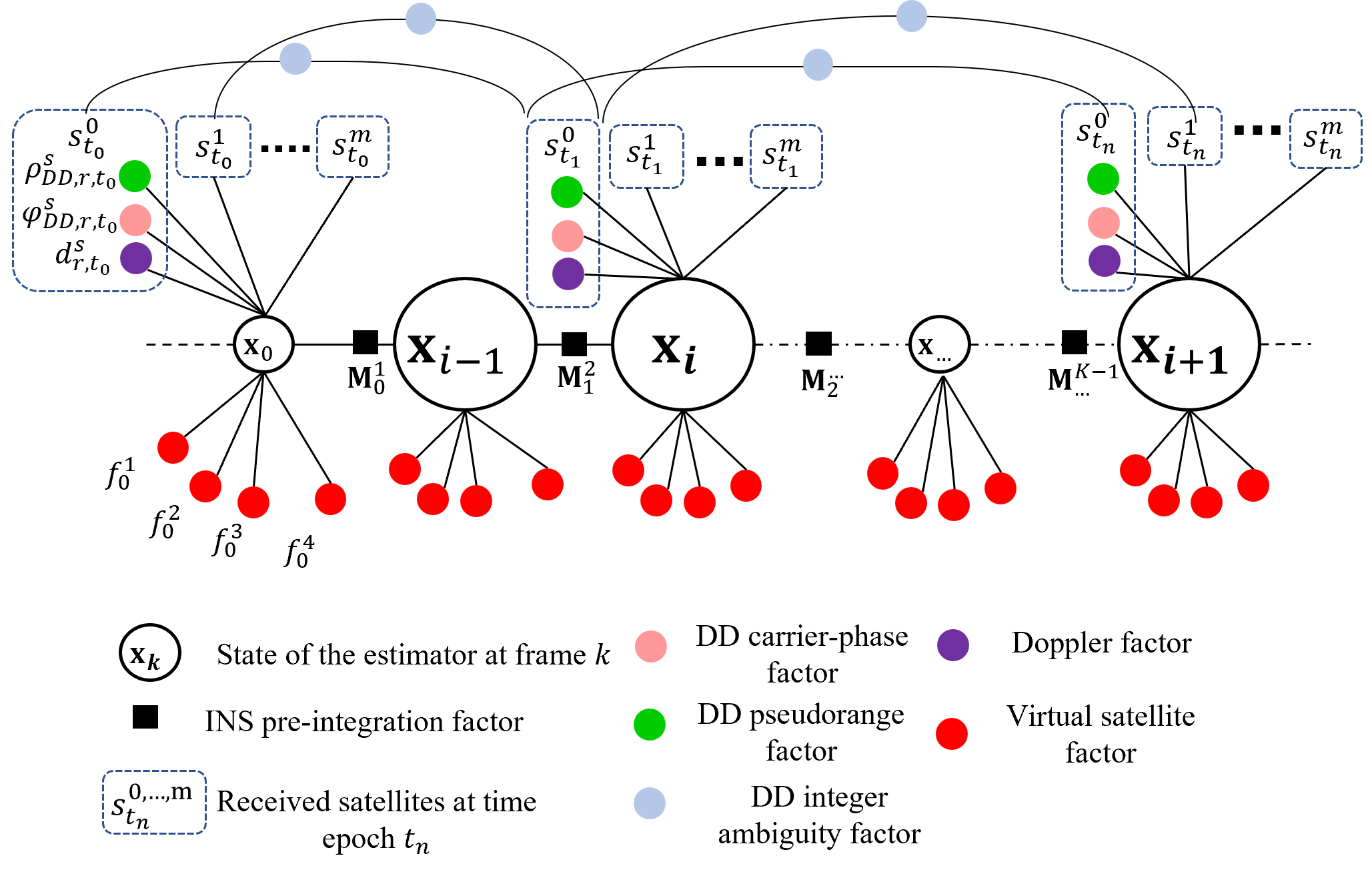
Data-driven-assisted GNSS RTK/INS Navigation for Autonomous Systems in Urban Canyons
January 01, 2024
Abstract
Huawei-PolyU High-accuracy Localization Project (second phase)
September 07, 2021
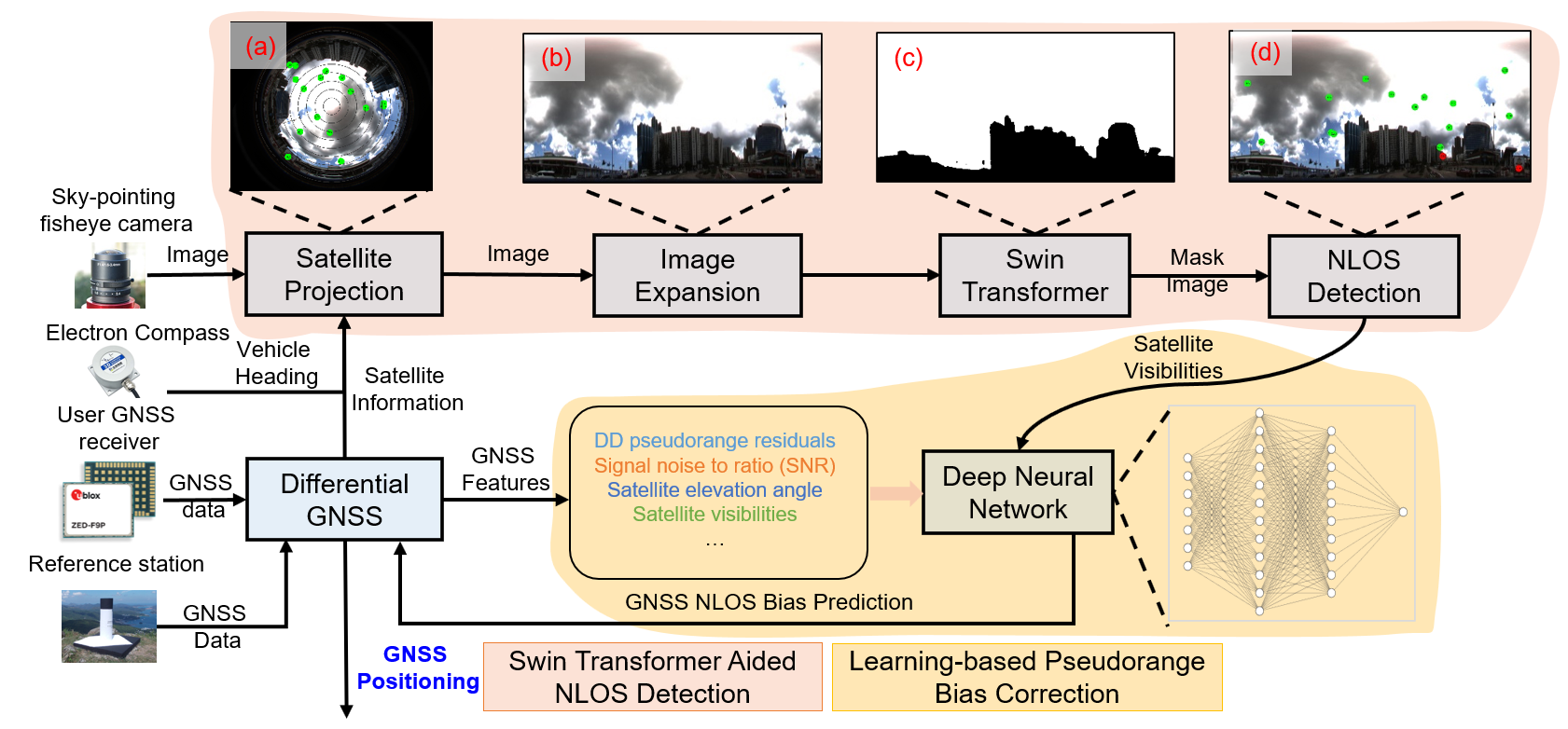
Developed LiDAR aided GNSS-RTK method based on the GNSS/IMU/LiDAR to provide highly accurate positioning results in the urban canyons.