🚗 End-to-End and Safety-Certifiable Autonomous Vehicles for Logistics Applications
Autonomous vehicles hold transformative potential for logistics and urban mobility, yet deploying them safely in real-world environments remains a grand challenge. This research focuses on developing end-to-end learning frameworks and safety-certifiable navigation systems for autonomous vehicles in logistics applications — from campus delivery and last-mile transportation to urban freight operations.
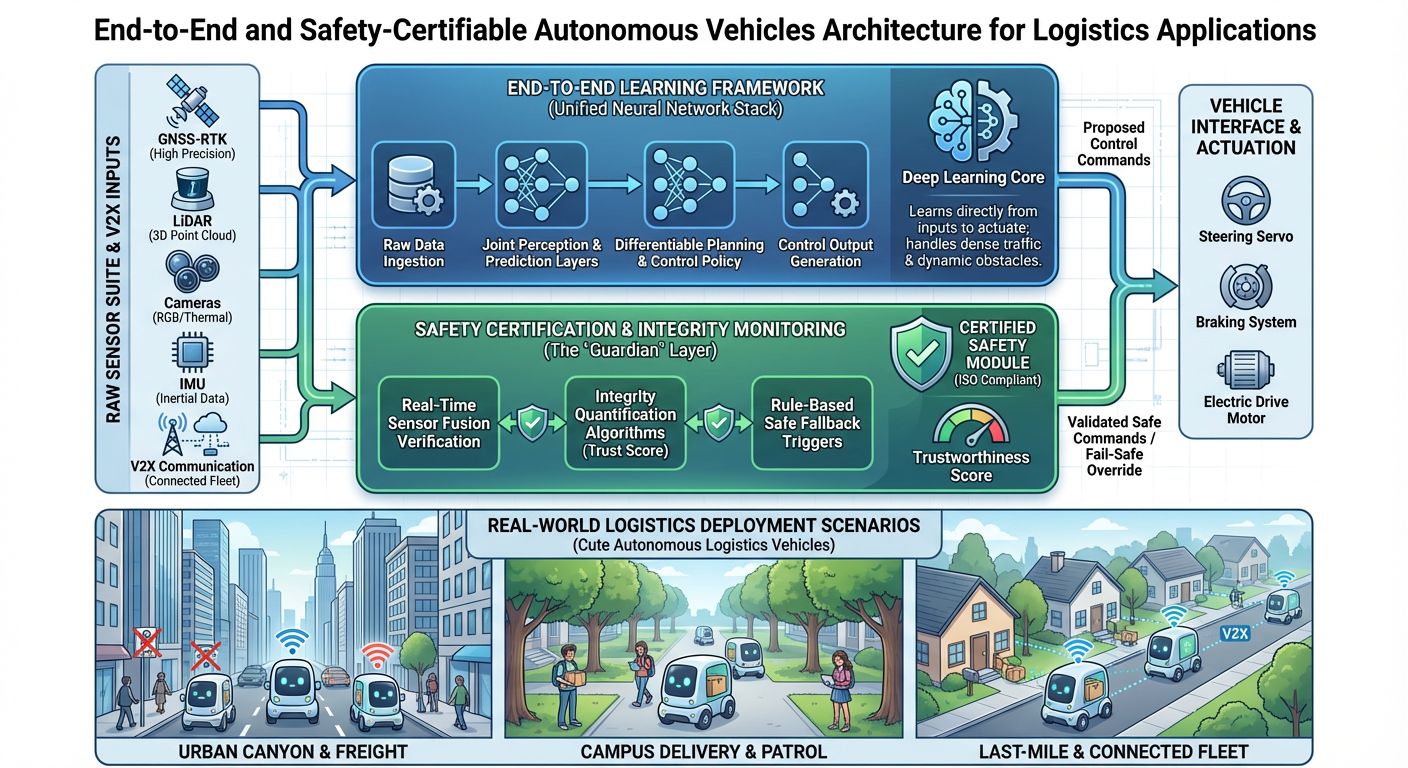
Our approach integrates three core elements:
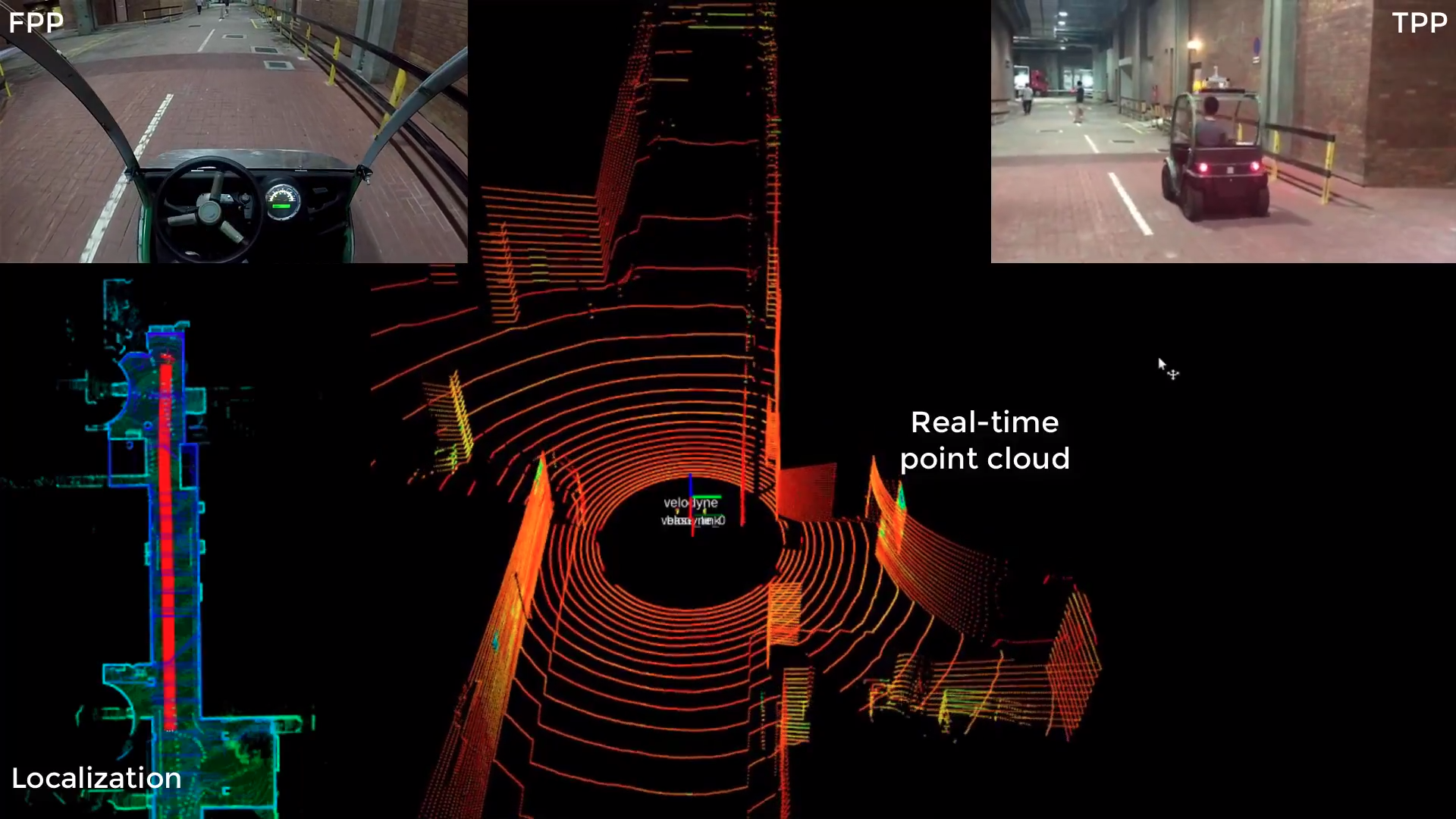
- End-to-End Autonomous Driving — We develop neural network architectures that learn to drive directly from raw sensor inputs (LiDAR, camera, IMU, GNSS) to control outputs, enabling autonomous vehicles to handle complex urban scenarios including dense traffic, dynamic obstacles, and GPS-degraded environments. Our end-to-end pipelines unify perception, prediction, planning, and control into a single differentiable framework.
- Safety Certification and Integrity Monitoring — Unlike conventional black-box approaches, our systems incorporate rigorous safety certification mechanisms. We design integrity monitoring algorithms that quantify the trustworthiness of navigation solutions in real time, enabling the vehicle to detect unsafe states and trigger fail-safe maneuvers. This is critical for logistics applications where reliability and regulatory compliance are paramount.
- Real-World Deployment for Logistics — We bridge the gap between research and application by developing full-stack autonomous vehicle platforms for logistics use cases, including campus patrol, autonomous delivery, and connected fleet management. Our platforms feature multi-sensor fusion (GNSS-RTK/LiDAR/Camera/IMU), V2X communication, and robust localization in challenging urban canyon environments.
Demo Videos & Photos

|
|
|
|
News
- Sept 2022, we welcome the PolyU Campus Facilities and Sustainability Office (CFSO) and Health and Safety Office (HSO) to attend the demonstration of AAE/CFSO Campus Security Patrol with Unmanned Ground Vehicle (UGV)
Selected Publications (*: Corresponding author)
-
Integrated Planning and Control on Manifolds: Factor Graph Representation and Toolkit.
IEEE International Conference on Robotics & Automation (ICRA), 2026. -
EIRM-RL: Epistemic Integrity Risk Monitoring Inspired Safe Reinforcement Learning for Trustworthy Autonomous Navigation.
IEEE Internet of Things Journal, 13(2), 3500-3512, 2025. -
Learning Safe, Optimal, Real-Time Flight Interaction with Deep Confidence-enhanced Reachability Guarantee.
IEEE Transactions on Intelligent Transportation Systems, 2025. -
Safety-quantifiable Line Feature-based Monocular Visual Localization with 3D Prior Map.
IEEE Transactions on Intelligent Transportation Systems, 2025. -
Continuous Error Map Aided Adaptive Multi-Sensor Integration for Connected Autonomous Vehicles in Urban Scenarios.
IEEE Transactions on Instrumentation and Measurement, 2025. -
Fault Detection Algorithm for Gaussian Mixture Noises: An Application in Lidar/IMU Integrated Localization Systems.
NAVIGATION: Journal of the Institute of Navigation, 72(1), 2025. -
Safety-Quantifiable Planar-Feature-based LiDAR Localization with a Prior Map for Intelligent Vehicles in Urban Scenarios.
IEEE Transactions on Intelligent Vehicles, 2024. -
A Novel Consistent-Robust SINS/GNSS/NHC Integrated Navigation Method for Autonomous Vehicles Under Intermittent GNSS Outage.
IEEE Transactions on Intelligent Vehicles, 2024. -
Tightly-coupled Visual/Inertial/Map Integration with Observability Analysis for Reliable Localization of Intelligent Vehicles.
IEEE Transactions on Intelligent Vehicles, 2024. -
Integration of Vehicle Dynamic Model and System Identification Model for Extending the Navigation Service Under Sensor Failures.
IEEE Transactions on Intelligent Vehicles, 2023. -
Dynamic Object-Aware LiDAR Odometry Aided by Joint Weightings Estimation in Urban Areas.
IEEE Transactions on Intelligent Vehicles, 2023. -
ECMD: An Event-Centric Multisensory Driving Dataset for SLAM.
IEEE Transactions on Intelligent Vehicles, 2023. -
An Improved Inertial Preintegration Model in Factor Graph Optimization for High Accuracy Positioning of Intelligent Vehicles.
IEEE Transactions on Intelligent Vehicles, 2023. -
UrbanLoco: A Full Sensor Suite Dataset for Mapping and Localization in Urban Scenes.
IEEE ICRA 2020, 2310-2316. -
UrbanNav: An Open-sourced Multisensory Dataset for Benchmarking Positioning Algorithms Designed for Urban Areas.
ION GNSS+ 2021.
Acknowledgement and Collaborators
This research is supported by government and industry partners, including the Hong Kong Polytechnic University, Guangdong Basic and Applied Basic Research Foundation, Hong Kong Smart Traffic Fund, Innovation and Technology Fund, Huawei Technologies, Meituan, Tencent, and iDriverplus. We also collaborate closely with the Mechanical Systems Control Lab at the University of California, Berkeley, and the Chemnitz University of Technology in Germany.

Projects (2)

Our Autonomous Platforms
January 01, 2025
Our cutting-edge research platforms for end-to-end AI self-driving, where neural networks learn to drive directly from sensor data to control outputs.
Vehicle-infrastructure Collaboration for Connected Unmanned Ground and Aerial Vehicles in Complex Urban Canyons
October 15, 2023
PolyU (UGC)