🚁 Embodied Drones for City Maintenance and Manipulation
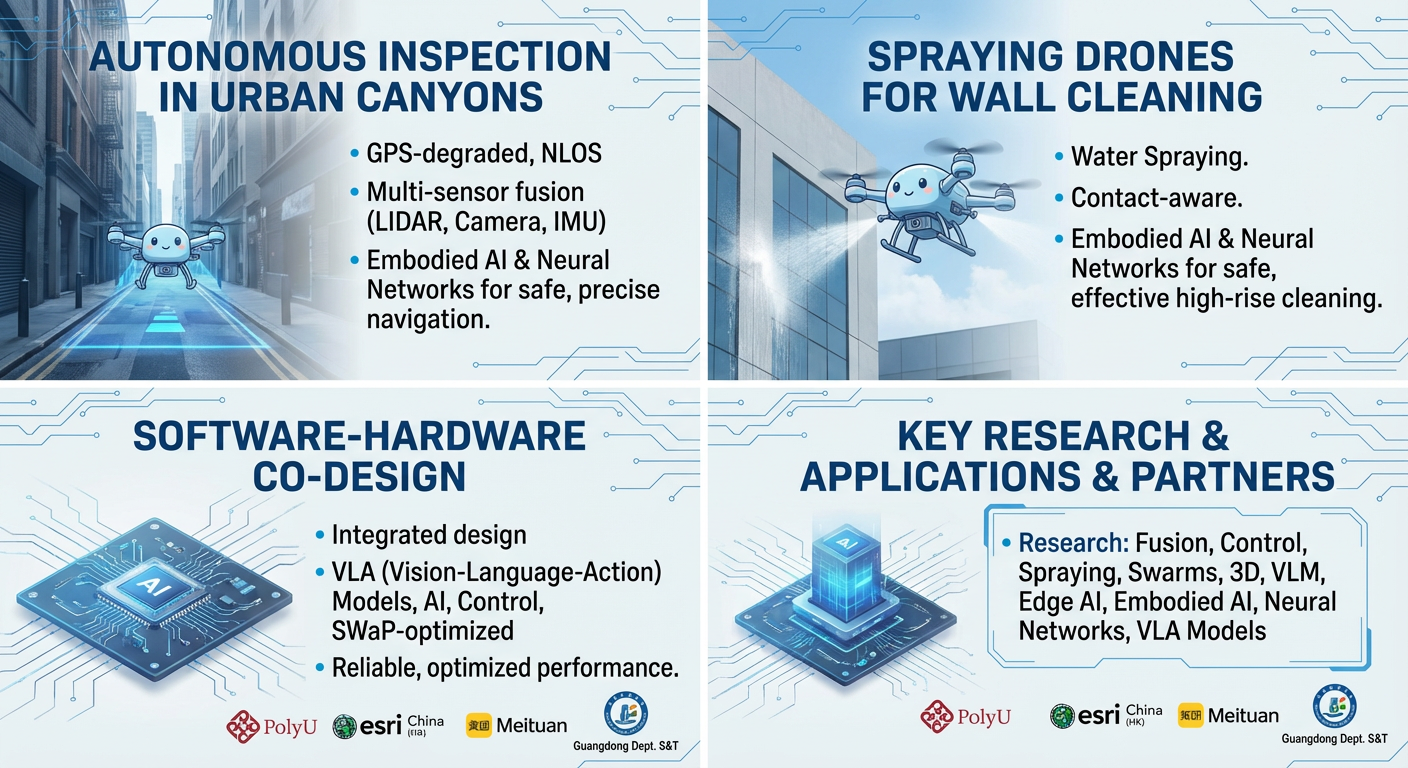
Maintaining urban infrastructure in dense city environments — particularly external wall cleaning of high-rise buildings and structural inspection in urban canyons — presents significant challenges that demand intelligent, physically interactive drone systems. This research develops embodied drone platforms that combine autonomous navigation in GPS-degraded urban canyons with contact-based manipulation capabilities for real-world city maintenance tasks.
Our approach addresses three fundamental challenges:
- Autonomous Inspection in Urban Canyons — Dense urban environments with tall buildings, narrow streets, and GPS-degraded conditions pose severe challenges for drone navigation. We develop AI-driven multi-sensor fusion algorithms (LiDAR/Camera/IMU/GNSS) and robust localization methods that enable drones to navigate safely and precisely in complex urban canyon environments. Our systems provide centimeter-level positioning for close-proximity inspection of building facades, bridges, and other urban structures.
- External Wall Cleaning with Drones — High-rise external wall cleaning is one of the most hazardous tasks in urban maintenance. We develop drone-based cleaning systems that integrate aerial manipulation with contact-aware flight control, enabling drones to approach building surfaces, maintain stable contact, and perform cleaning operations autonomously. Our force-controlled manipulation strategies ensure safe and effective cleaning while accommodating varying surface geometries, wind disturbances, and dynamic environmental conditions.
- Software-Hardware Co-Design for Maintenance Drones — We pursue an integrated approach to drone system design, jointly optimizing the AI software stack (perception, planning, contact control) with the hardware platform (airframe, cleaning/manipulation end-effectors, onboard compute) to achieve reliable embodied AI performance under the strict size, weight, and power (SWaP) constraints of aerial platforms.
Demo Videos
Key Research Directions
- Multi-sensor fusion for drone navigation in urban canyons (GPS-degraded, NLOS-affected environments)
- Close-proximity flight control for building facade inspection and maintenance
- Drone-based external wall cleaning — contact-aware planning and force-controlled manipulation
- UAV swarm coordination for large-scale building inspection campaigns
- 3D reconstruction and defect detection for structural health monitoring of urban infrastructure
- Vision-language models for intelligent mission planning and task understanding
- Edge AI deployment on resource-constrained drone platforms for real-time perception
Target Applications
- External wall cleaning: Autonomous drone-based cleaning of high-rise building facades, replacing dangerous manual rope-access work
- Building facade inspection: Crack detection, water leakage identification, and structural defect assessment in urban canyons
- Bridge and infrastructure inspection: Close-proximity structural health monitoring with aerial sensing and manipulation
- Offshore wind turbine inspection: Drone-based blade inspection and surface assessment in challenging marine environments
Recent News
- June 2024: Interview by RTHK on UAV-enabled window cleaning and aerial 3D printing
- May 2024: Interview by Hong Kong TVB and Ming Pao on UAV-enabled external wall cleaning technology
- July 2024: Interview by Toutiao (头条日报) on low-altitude economy applications
Press Coverage Photos
 RTHK Interview |
 TVB Coverage |
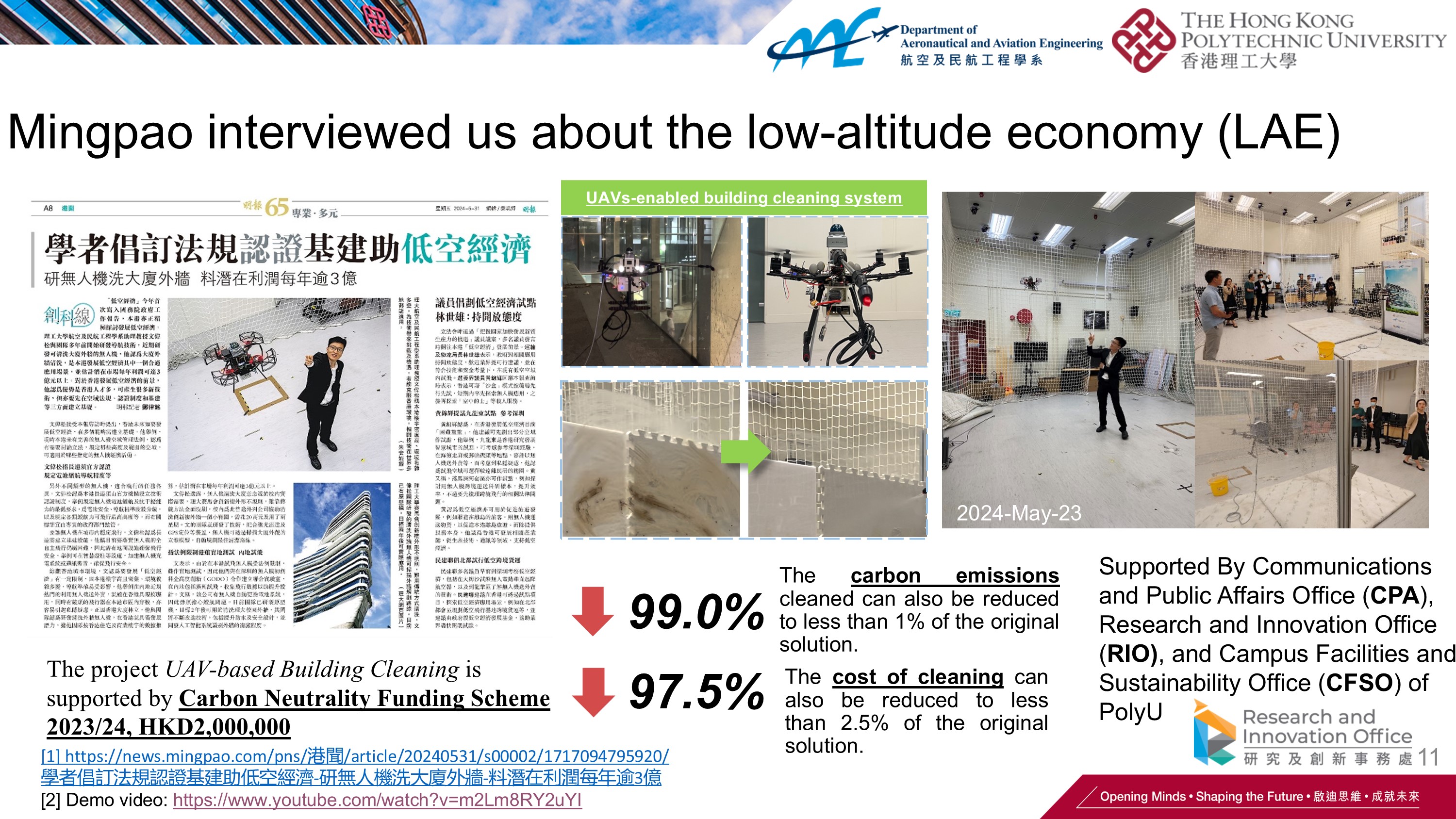 Ming Pao Coverage |
Selected Publications (*: Corresponding author)
-
Integrated Planning and Control on Manifolds: Factor Graph Representation and Toolkit.
IEEE International Conference on Robotics & Automation (ICRA), 2026. -
Learning Safe, Optimal, Real-Time Flight Interaction with Deep Confidence-enhanced Reachability Guarantee.
IEEE Transactions on Intelligent Transportation Systems, 2025. -
Tightly Joined Positioning and Control Model for Unmanned Aerial Vehicles Based on Factor Graph Optimization.
IEEE Transactions on Vehicular Technology, 2025. -
Online Dynamic Model Calibration for Reliable Control of Quadrotor Based on Factor Graph Optimization.
IEEE Transactions on Aerospace and Electronic Systems, 2025. -
RTT-LIO: A Wi-Fi RTT-aided LiDAR-Inertial Odometry via Tightly-Coupled Factor Graph Optimization in Complex Scenes.
IEEE Internet of Things Journal, 2025. -
Safe-Assured Learning-Based Deep SE(3) Motion Joint Planning and Control for UAV Interactions with Dynamic Environments.
IEEE ITSC 2024. -
SUG-UAV Multirotor Dataset with Multi-sensor Integration in Indoor and Urban Areas.
IPIN 2024. -
Tightly Joining Positioning and Control for Trustworthy Unmanned Aerial Vehicles Based on Factor Graph Optimization in Urban Transportation.
IEEE ITSC 2023. -
Tightly-Coupled Wi-Fi/LiDAR/Inertial Integration via Factor Graph Optimization for UAS.
2025 IEEE/ION PLANS, 648-653.
Acknowledgement and Collaborators
This research is supported by The Hong Kong Polytechnic University, the Department of Science and Technology of Guangdong Province (Drone System and Offshore Wind Turbines Inspection), Esri China (HK) Limited (Vision-Language-Action Models for Intelligent UAV Systems), and Meituan (Vision Aided GNSS-RTK Positioning for UAV System in Urban Canyons). We collaborate with leading research groups and industry partners in intelligent drone systems and urban maintenance solutions.
Projects (5)
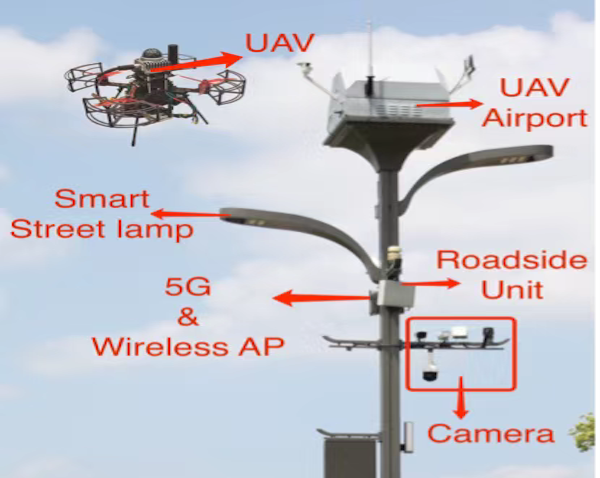
Reliable UAV Perception and Perching Solutions in Urban Streets
December 09, 2024
Develop a comprehensive UAV perception and Perching solution, focusing on the integration of smart streetlight poles with a UAV takeoff, landing, and battery exchange platform
Safe-assured Learning-based Deep SE(3) Motion Joint Planning and Control for Unmanned Aerial Vehicles
April 08, 2024
PolyU (UGC)

Safety-certifiable UAV System for Terrian and Civil Infrastructure Inspection
January 01, 2023
PolyU (UGC)