🛰️ 3D LiDAR Aided GNSS Positioning for Robotics Navigation
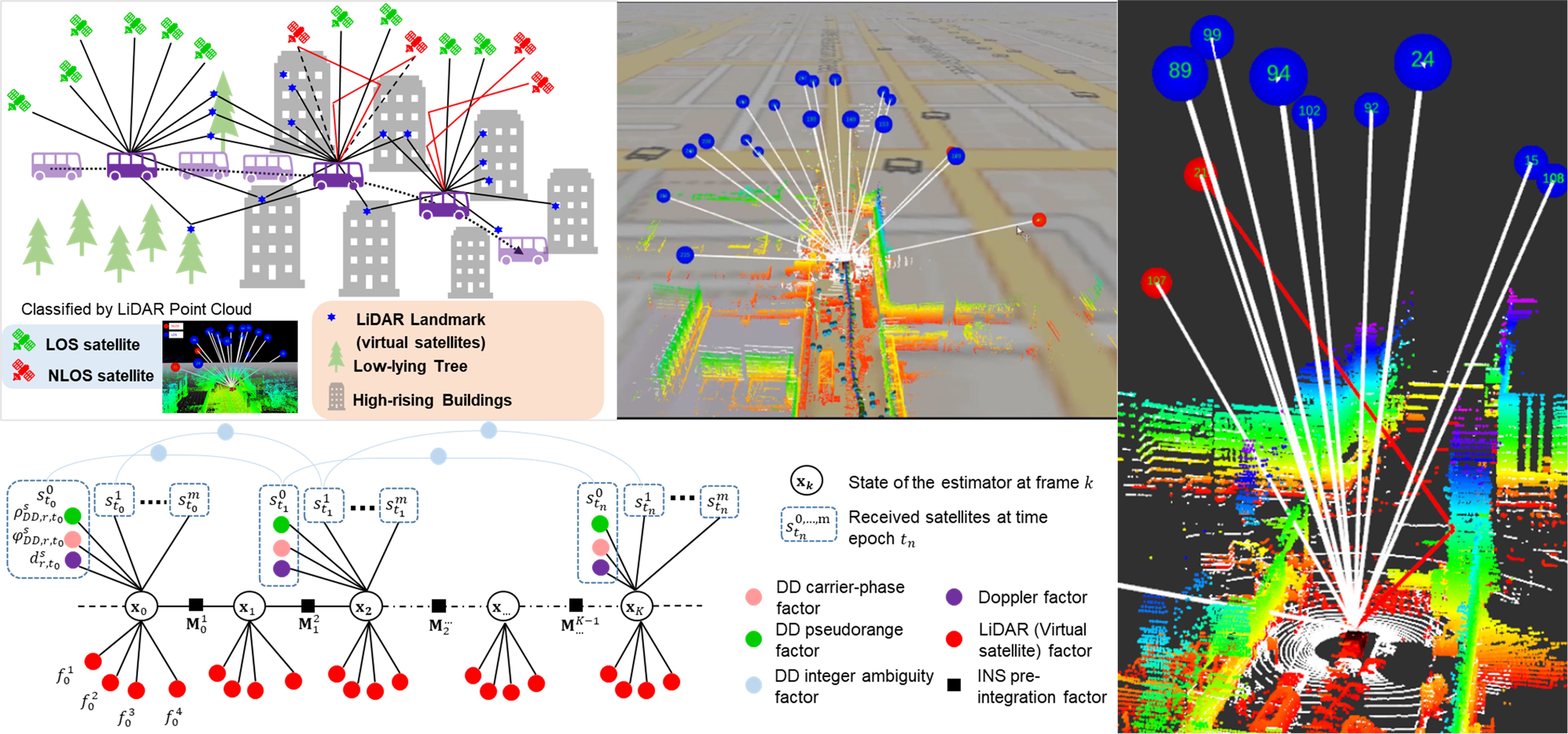
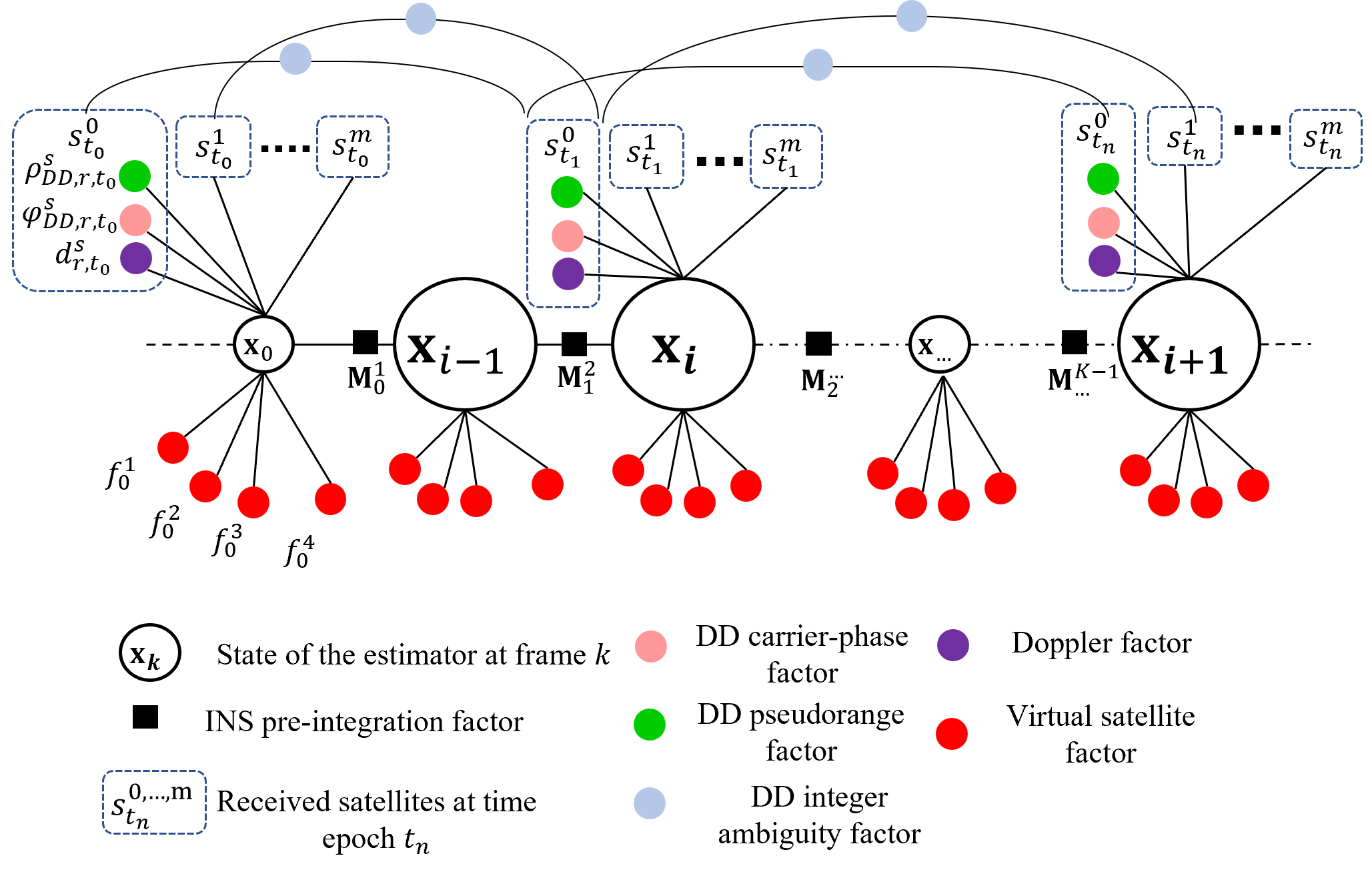
Positioning in urban environments is becoming essential due to the increasing demand for autonomous driving vehicles (ADV). The global navigation satellite system (GNSS) is currently one of the principal means of providing globally-referenced positioning for ADV localization. With the increased availability of multiple satellite constellations, GNSS can provide satisfactory performance in open-sky areas. However, the positioning accuracy is significantly degraded in highly-urbanized cities such as Hong Kong, due to signal reflection caused by static buildings and dynamic objects such as double-decker buses. If the direct line-of-sight (LOS) is blocked, and reflected signals from the same satellite are received, the notorious non-line-of-sight (NLOS) receptions occur. According to a recent review paper, NLOS is currently the major difficulty in the use of GNSS in intelligent transportation systems.
Inspired by the strong perception capability of ADV using onboard sensors (such as 3D LiDAR), we continuously developed the perception-aided NLOS mitigation methods where the 3D LiDAR is employed to timely reconstruct the surrounding environments to identify the NLOS receptions. The idea was also reported in the industrial magazine in 2018. The work was further improved in 2020, where several drawbacks are relaxed and was awarded the Best Presentation Award in the session of Navigation in Urban Environments. Interestingly, this award is selected by the session chairs from Waymo and Swift Navigation. Meanwhile, the idea is transferred into industrial applications for high-accuracy offline mapping applications. Recently, we extended the LiDAR aided GNSS NLOS mitigation to the GNSS Real-time Kinematic (RTK), leading to sub-meter level accuracy. Unfortunately, the fixed rate of the RTK is still not guaranteed as:
- The existing method does not fully mitigate the NLOS with multiple reflections and multipath. It is still an unknown question to model the multiple reflection and multipath.
- Poor satellite geometry due to the signal blockage and potential NLOS exclusion. It is still an unknown question to effectively improve the geometry of the satellite constraints in dense urban canyons.
Recent News
- May 2022, 1 paper accepted in IEEE Transactions on Intelligent Transportation Systems.
- Wen, W., and Hsu, L.T., 2022. 3D LiDAR Aided GNSS NLOS Mitigation in Urban Canyons. IEEE Transactions on Intelligent Transportation Systems.
- 23rd April 2022, our conference paper was accepted in ION GNSS+ 2022.
- Liu, X., Wen, W*., and Hsu, L.T. 2022, September. 3D LiDAR Aided GNSS Real-time Kinematic Positioning via Coarse-to-fine Batch Optimization for High Accuracy Mapping in Dense Urban Canyons. In Proceedings of ION GNSS+ 2022.
Video Demonstration
Related Papers (*: Corresponding author)
2025
-
3-D LiDAR-Aided GNSS NLOS Mitigation for Reliable GNSS-RTK Positioning in Urban Canyons.
IEEE Transactions on Instrumentation and Measurement, 74, 1-15, 2025. -
3D LiDAR Aided GNSS NLOS Correction by Direction-of-Arrival Estimation Using Doppler Measurements in Urban Canyons.
IEEE Transactions on Intelligent Transportation Systems, 2025. -
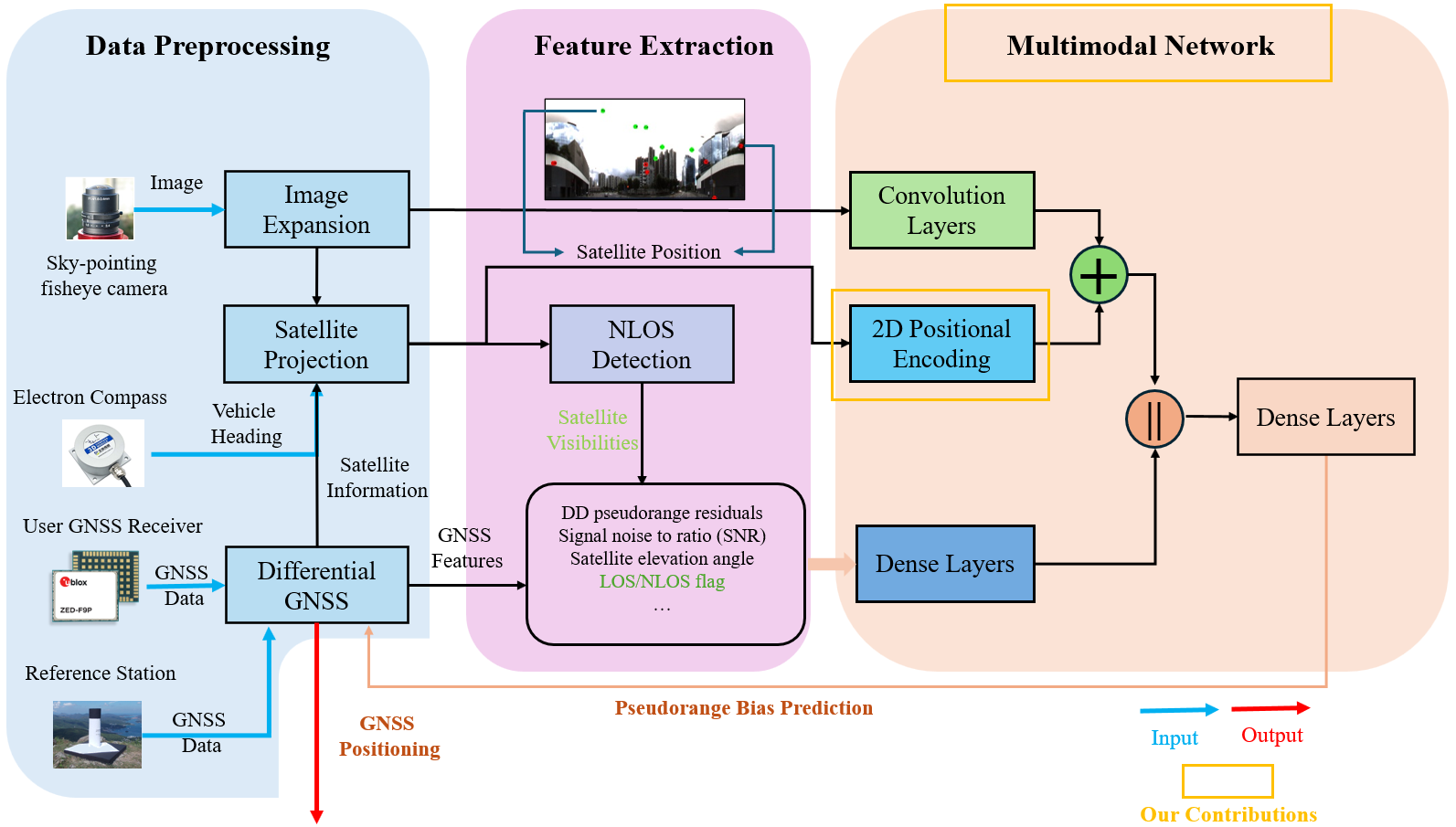
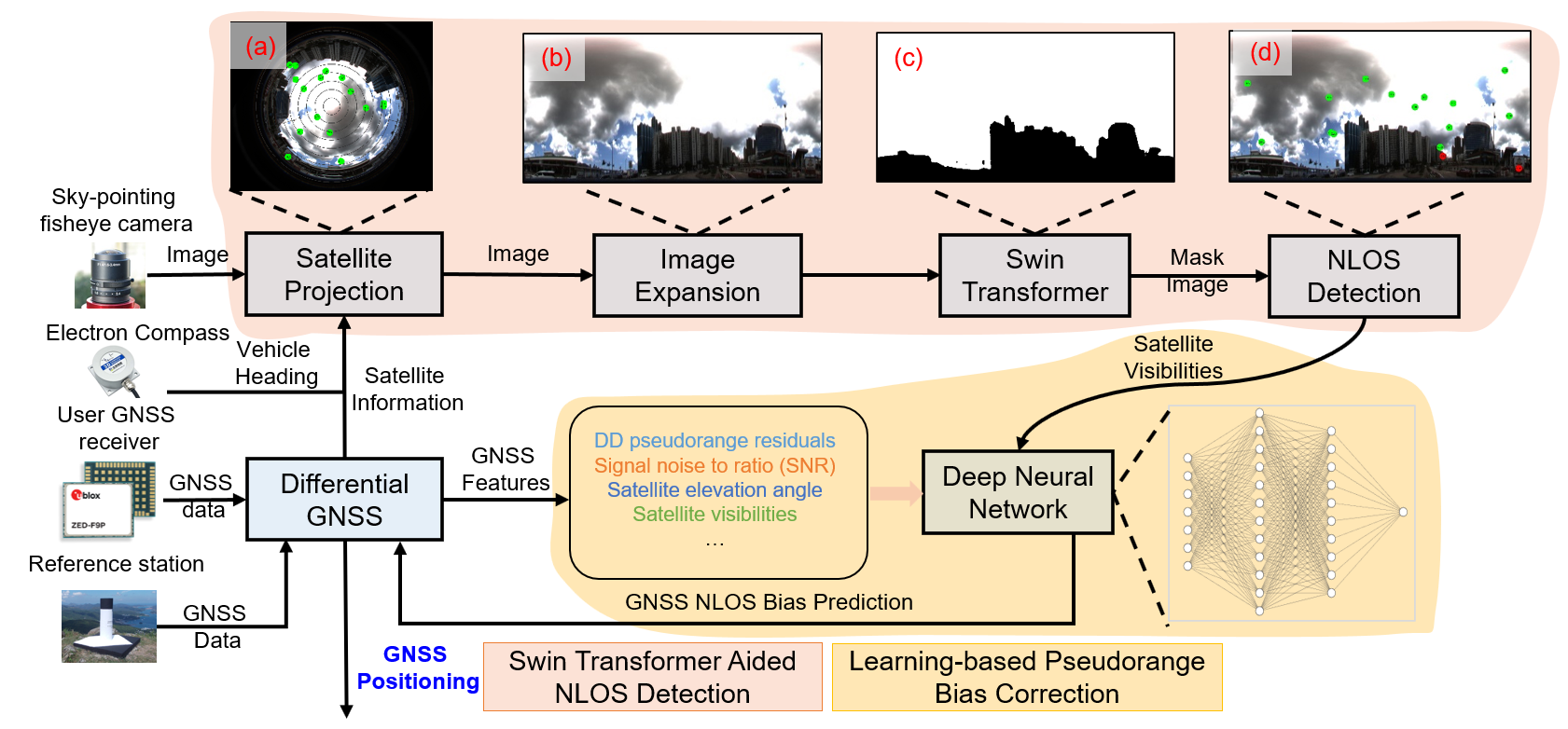
Fisheye Image/GNSS Based Multimodal Learning for GNSS NLOS/Multipath Correction: Enhancing Vehicle Positioning in Urban Canyons for Autonomous Driving.
IEEE Transactions on Vehicular Technology, 2025. -
pyrtklib: An Open-source Package for Tightly Coupled Deep Learning and GNSS Integration for Positioning in Urban Canyons.
IEEE Transactions on Intelligent Transportation Systems, 2025. -
Urban GNSS Positioning for Consumer Electronics: 3D Mapping and Advanced Signal Processing.
IEEE Transactions on Consumer Electronics, 2025.
2024
-
Integrity-Constrained Factor Graph Optimization for GNSS Positioning in Urban Canyons.
NAVIGATION: Journal of the Institute of Navigation, 2024. -
Subspace-based Adaptive GMM Error Modeling for Fault-Aware Pseudorange-based Positioning in Urban Canyons.
IEEE Transactions on Intelligent Vehicles, 2024. -
Trajectory Smoothing Using GNSS/PDR Integration Via Factor Graph Optimization in Urban Canyons.
IEEE Internet of Things Journal, 2024. -
Enhancing GNSS Positioning Accuracy for Road Monitoring Systems: A Factor Graph Optimization Approach Aided by Geospatial Information.
IEEE Transactions on Instrumentation and Measurement, 73, 1-12, 2024.
2023
-
3D Vision Aided GNSS Real-time Kinematic Positioning for Autonomous Systems in Urban Canyons.
NAVIGATION: Journal of the Institute of Navigation, 2023. -
Hong Kong UrbanNav: An Open-Source Multisensory Dataset for Benchmarking Urban Navigation Algorithms.
NAVIGATION: Journal of the Institute of Navigation, 70(4), 2023. -
GLIO: Tightly-coupled GNSS/LiDAR/IMU Integration for Continuous and Drift-free State Estimation of Intelligent Vehicles in Urban Areas.
IEEE Transactions on Intelligent Vehicles, 2023.
2021–2022
-
3D LiDAR Aided GNSS NLOS Mitigation in Urban Canyons.
IEEE Transactions on Intelligent Transportation Systems, 2021. -
Time-correlated Window Carrier-phase Aided GNSS Positioning in Urban Canyons.
IEEE Transactions on Aerospace and Electronic Systems, 2022. -
GNSS Outlier Mitigation via Graduated Non-convexity Factor Graph Optimization.
IEEE Transactions on Vehicular Technology, 71(1), 297-310, 2021. -
Factor Graph Optimization for GNSS/INS Integration: A Comparison with the Extended Kalman Filter.
NAVIGATION: Journal of the Institute of Navigation, 68(2), 315-331, 2021.
2018–2020
-
Object-Detection-Aided GNSS and Its Integration With Lidar in Highly Urbanized Areas.
IEEE Intelligent Transportation Systems Magazine, 12(3), 53-69, 2020. -
GNSS NLOS Exclusion Based on Dynamic Object Detection Using LiDAR Point Cloud.
IEEE Transactions on Intelligent Transportation Systems, 2019. -
Correcting NLOS by 3D LiDAR and Building Height to Improve GNSS Single Point Positioning.
NAVIGATION: Journal of the Institute of Navigation, 66(4), 705-718, 2019. -
Tightly Coupled GNSS/INS Integration via Factor Graph and Aided by Fish-eye Camera.
IEEE Transactions on Vehicular Technology, 68(11), 10651-10662, 2019.
Press Coverage
- Inside GNSS — Feature on perceived environment aided GNSS positioning
- Innovation Award from TechConnect
- Best Presentation Award in ION GNSS+ 2020 — Session on Navigation in Urban Environments
Acknowledgement and Collaborators
This research was funded by government and industry partners, including Hong Kong Polytechnic University, Guangdong Basic and Applied Basic Research Foundation, Riemann Laboratory, and Huawei Technologies.

Projects (6)
Data-driven-assisted GNSS RTK/INS Navigation for Autonomous Systems in Urban Canyons
January 01, 2024
Abstract
Huawei-PolyU High-accuracy Localization Project (second phase)
September 07, 2021
Developed LiDAR aided GNSS-RTK method based on the GNSS/IMU/LiDAR to provide highly accurate positioning results in the urban canyons.