Dataset & Code
2026 (1)
A ROS1 package for Ceres-based GNSS/IMU loosely coupled sliding-window optimization, designed for robust multi-sensor navigation.
2025 (7)
A tightly coupled deep learning framework for GNSS positioning in challenging urban environments.
Tightly-coupled Visual/Inertial/Map integration with observability analysis for reliable localization of intelligent vehicles.
A simple and modern Python interface for GNSS positioning, built on top of pyrtklib.
A complete Python binding for RTKLIB, bringing the full power of the most widely-used GNSS positioning library to the Python ecosystem.
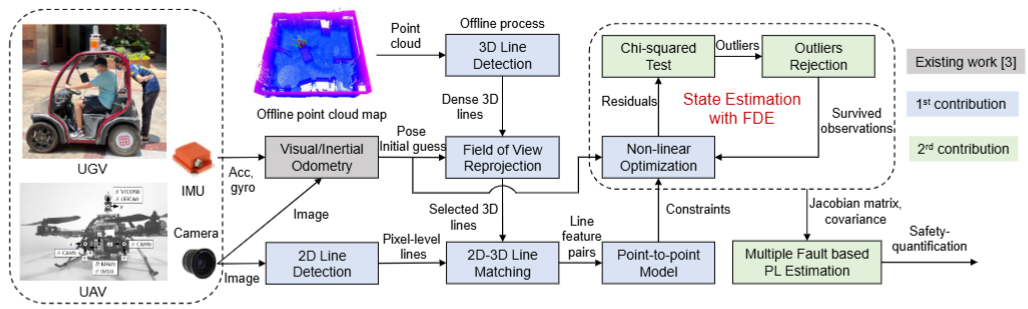
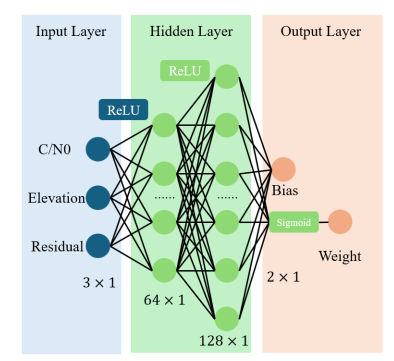
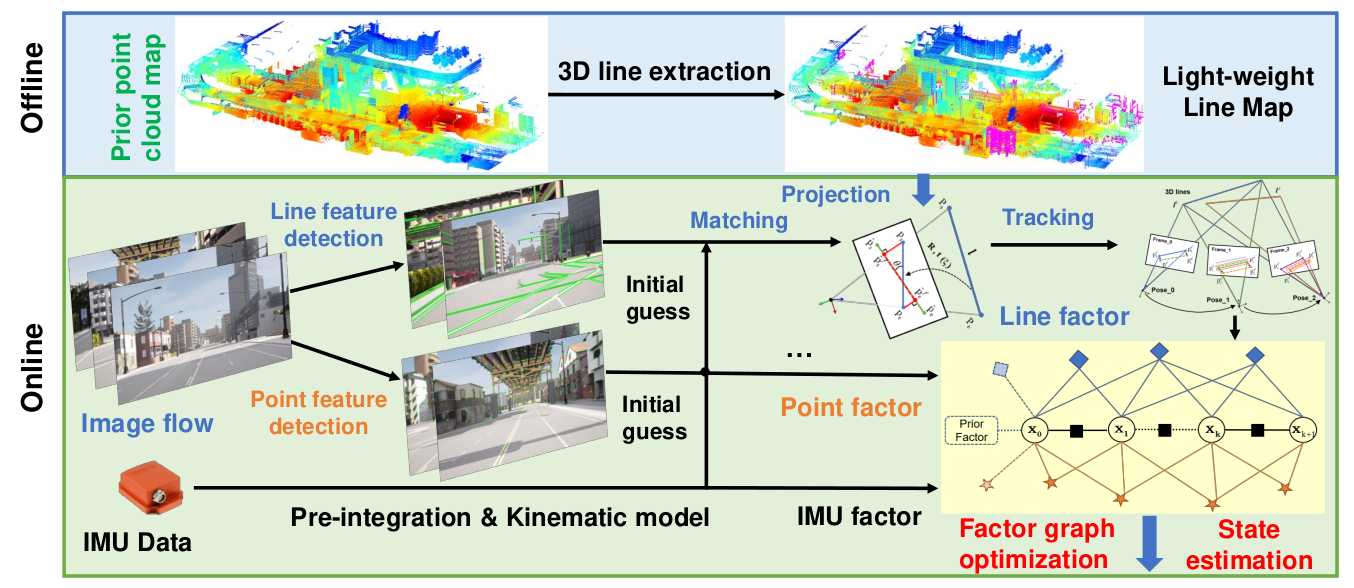
Safety-quantifiable line feature-based monocular visual localization with 3D prior map and integrity monitoring.
An open urban GNSS dataset with LOS/NLOS satellite labels for benchmarking GNSS positioning in challenging environments.
An open-source HD vector map (HDVM) generation pipeline for autonomous vehicles, integrating GNSS, INS, LiDAR, and camera data.