News
2026 (11)

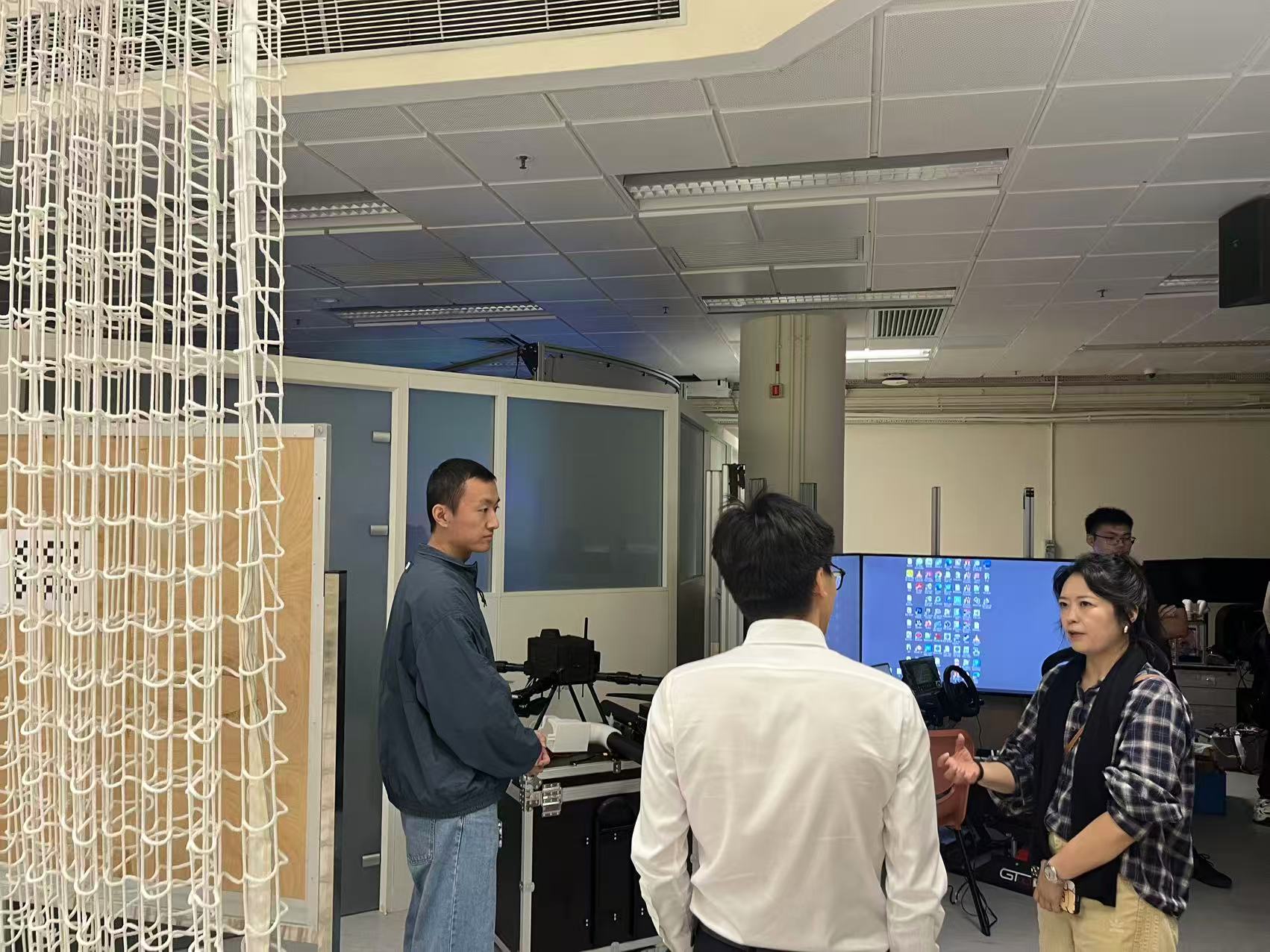
China Intelligent & Connected Vehicles (Beijing) Research Institute visit PolyU
TAS Team Meets with Genvict to Discuss Smart Mobility Collaboration

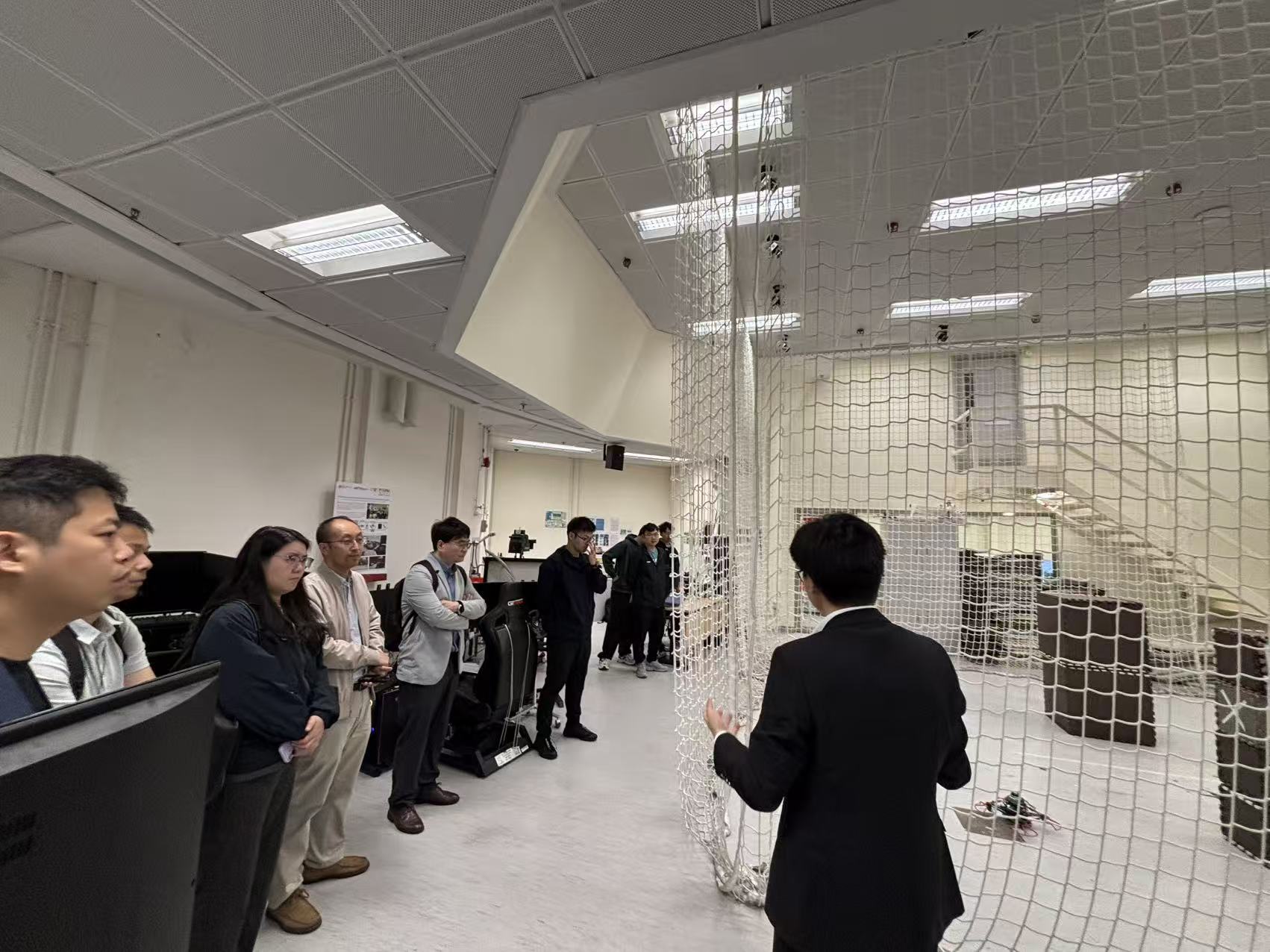
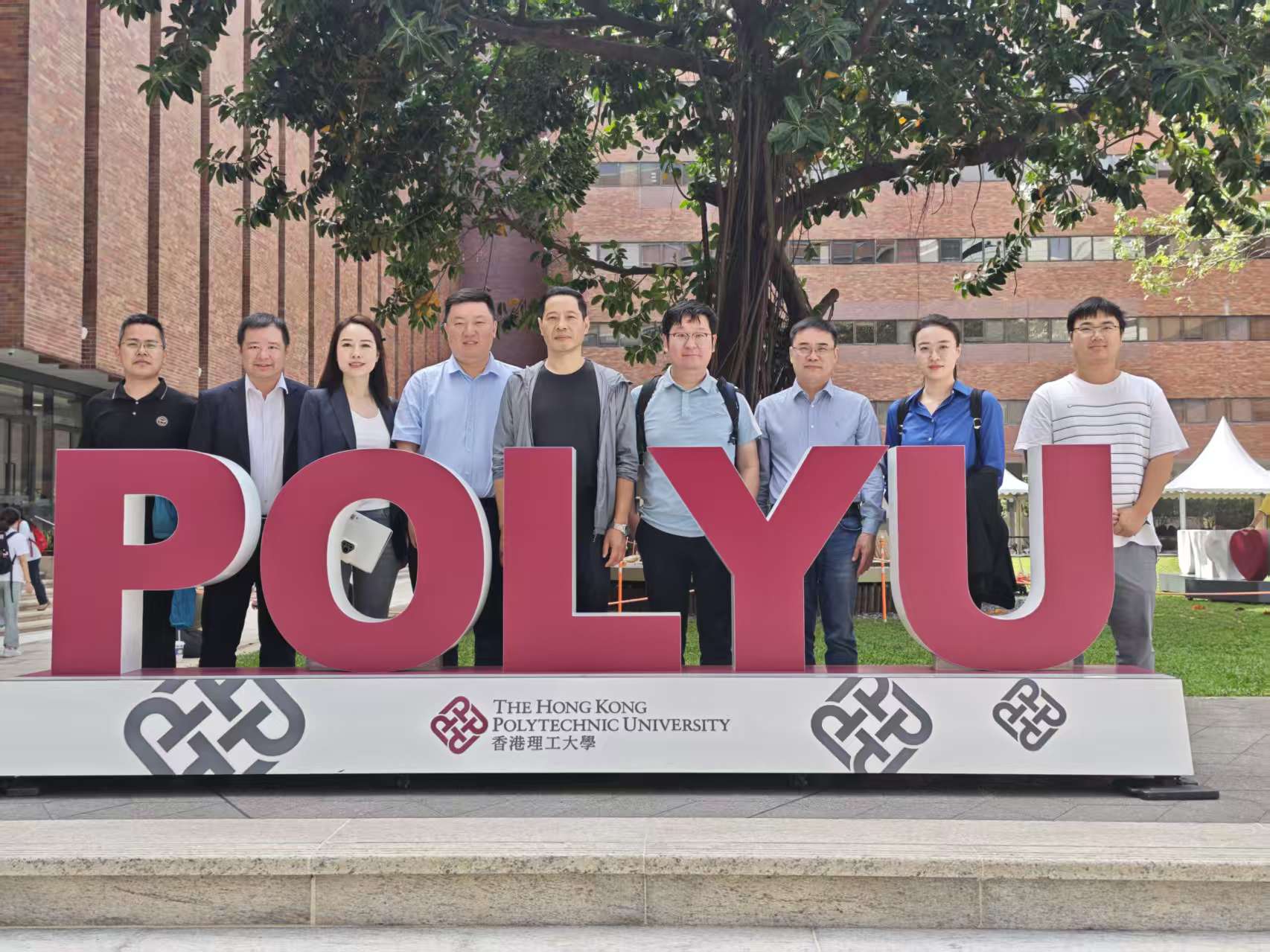
PolyU CFSO Delegation Visits Wuxi Research Institute and Observes Smart Drone Cleaning Demo in Shanghai

We’re organizing the 1st Workshop on Robot Meets GNSS and Ranging for Seamless Autonomy, happening on Friday, June 5, 2026 in Vienna. If you work on reliable autonomy in the real world—especially where GNSS/UWB/ranging gets messy—this workshop is for you. You can find more details from the workshop page
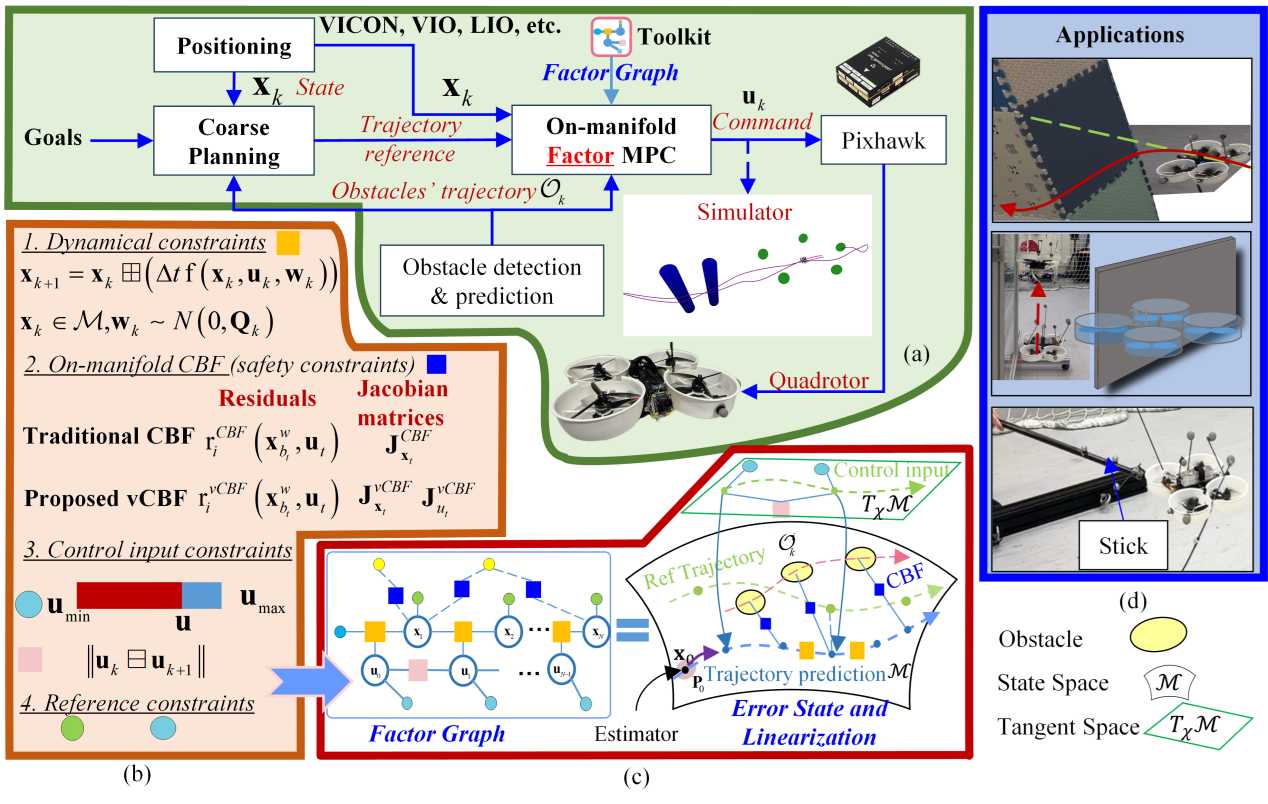
It is great to share that our paper (“Integrated Planning and Control on Manifolds: Factor Graph Representation and Toolkit” by Peiwen Yang, Weisong Wen, Runqiu Yang, Yuanyuan Zhang, Jiahao Hu, Yingming Chen, Naigui Xiao and Jiaqi Zhao) is accepted by the 2026 IEEE International Conference on Robotics & Automation. Congratulations to Peiwen and etc.!


HONG KONG, China – January 29, 2026 – The Hong Kong Polytechnic University’s Trustworthy AI and Autonomous Systems Laboratory (TAS LAB) held a strategic cooperation meeting with SF Express Hong Kong and Rino AI to explore collaborative opportunities in smart logistics and autonomous campus delivery vehicles . This meeting underscores PolyU’s commitment to advancing industry-academia partnerships and developing practical solutions for next-generation logistics systems that address real-world challenges in urban delivery and campus mobility.

HONG KONG, China – January 19, 2026 – The Hong Kong Polytechnic University and Beijing Simple AI Technology Co., Ltd. (Simple AI) officially launched their strategic partnership through a Memorandum of Understanding (MOU) signing ceremony. Held at PolyU’s Chiang Chen Studio Theatre (AG204), the event brought together key representatives from both institutions to exchange the agreement and discuss future collaborations in embodied intelligent robotics. This partnership underscores PolyU’s commitment to advancing industry-academia synergies and driving innovation in AI-driven technologies for real-world applications.
PolyU TAS LAB Releases TasFusion: A GNSS/IMU Sliding-Window Optimization Framework

SHENZHEN, China – January 16, 2026 – The TAS Team embarked on a productive visit to LINXAI Company, a leading innovator in robotics technology. The purpose of the visit was to engage in detailed discussions on ongoing collaboration projects centered around the quadruped robot, while also touring the company’s advanced laboratory facilities. This exchange highlights PolyU’s dedication to fostering industry-academia partnerships and advancing practical applications in robotics.

PolyU AAE and Rino.ai sign MOU to advance autonomous delivery vehicle applications
2025 (70)

Team Successfully Demonstrates Automated Drone Building Cleaning at Shanghai Pudong Software Park

Team Demonstrates Airblower UAV Technology with Civil Aviation Department at PolyU

It is great to share that our paper (“RTT-LIO: A Wi-Fi RTT-aided LiDAR-Inertial Odometry via Tightly-Coupled Factor Graph Optimization in Complex Scenes”, by Ruijie Xu, Xikun Liu, Xin Wang, Weisong Wen, and Yulong Huang) is accepted by the IEEE Internet of Things Journal. Congratulations to Ruijie and etc.!

JINJIANG, China – December 14, 2025 – The TAS Research Team from The Hong Kong Polytechnic University (PolyU) made a strong impression at the inaugural “Hong Kong Polytechnic University Technology Transfer Conference & Inaugural Annual Exchange Meeting of the Institute for Technological Innovation (2025).” Held in Jinjiang City, Fujian Province, the event drew over 3,500 participants from government, academia, and industry, focusing on advancing industry-academia-research integration and fostering an innovation ecosystem.

GOLD COAST, AUSTRALIA – November 18, 2025 – The 4th Workshop on Intelligent Vehicle Meets Urban: Safe And Certifiable Navigation And Control was successfully held at the Star Grand, Broadbeach, Gold Coast, Australia, in conjunction with the ITSC 2025 conference. The event convened leading experts and researchers to address the critical challenges of ensuring safe, robust, and certifiable autonomous navigation in complex urban environments.

HONG KONG – November 12, 2025 – The 28th Beijing-Hong Kong Economic Cooperation Symposium witnessed a showcase of technological innovation as Dr. Runqiu Yang and Mr. Zhongqi Wang from our research laboratory presented our work on quadruped robot. The robot is designed for inspection, logistics, and search-and-rescue operations, capable of carrying heavy loads for extended periods. The demonstration attracted substantial attention from government officials, industry leaders, and academic professionals.

Professor Weisong Wen interviewed by UBeat on “Drone-Based Curtain Wall Cleaning” technology and prospects

HONG KONG – November 10, 2025 – The TAS Lab at The Hong Kong Polytechnic University (PolyU) today welcomed a distinguished delegation from Harbin Engineering University (HEU), led by Vice President YU Zhiwen. The visit was organized to demonstrate the lab’s latest advancements in autonomous systems and to deepen the research partnership between the two institutions.
SHENZHEN, China – November 6, 2025 – A research delegation from The Hong Kong Polytechnic University (PolyU), led by Professor Wen Weisong, visited the offices of [Shenzhen Chuanghuan] today to engage in high-level technical discussions and explore future collaboration.

HONG KONG – November 3, 2025 – The TAS Lab from The Hong Kong Polytechnic University (PolyU) presented its cutting-edge unmanned aerial vehicle (UAV) technology at a special exhibition during the annual dinner of The Chartered Institute of Housing (CIH) Asian Pacific Branch.

Congratulations to the successfully PhD oral defense of Dr. ZHENG Xi!
Officials from the Nanjing Jiangning Economic Development Zone visited The Hong Kong Polytechnic University, where they were introduced to the research activities of the Trustworthy AI and Autonomous Systems Laboratory. The delegation was given an overview of several innovative projects, including cleaning drones, tunnel inspection drones, humanoid robots, and end-to-end autonomous driving systems.
Representatives from the Shougang Jinggang Innovation Center visited The Hong Kong Polytechnic University (PolyU), where they were introduced to the research activities of the Trustworthy AI and Autonomous Systems Laboratory (TAS Lab).
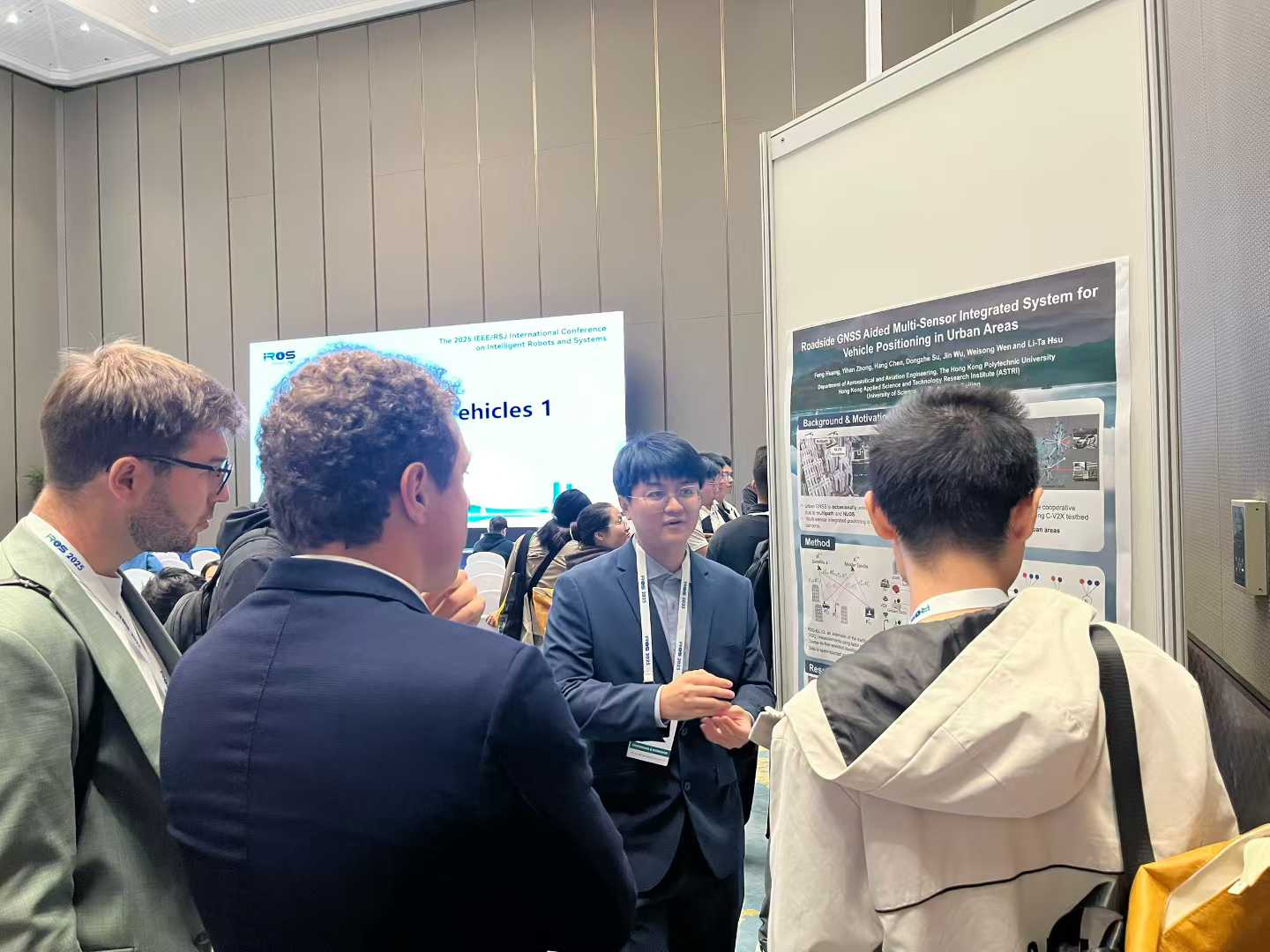
Our lab member Dr. HUANG Feng and PhD student ZHONG Yihan are presenting their work at IEEE IROS 2025. After 19 years, IROS returns to China, coinciding with a pivotal moment in the rapid advancement of AI and robotics—making IROS 2025 an outstanding venue for discussion and networking.. The data of our work is available at Github.

Inner Mongolia Research and Industry Exchange — Unmanned Systems and Photovoltaic Fieldwork
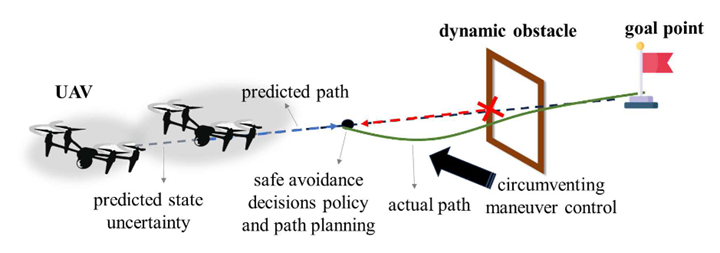
It is great to share that our paper (“Learning Safe, Optimal, and Real-Time Flight Interaction With Deep Confidence-Enhanced Reachability Guarantee”, by Yuanyuan Zhang, Yingying Wang, Penggao Yan, and Weisong Wen) is accepted by the IEEE Transactions on Intelligent Transportation Systems. Congratulations to Yuanyuan and our collegues.

TAS LAB Advances Collaboration on Offshore Wind Turbine Inspection with China Southern Power Grid

Hong Kong, September 29th, 2025 – The Aeronautics and Aviation Engineering (AAE) department at The Hong Kong Polytechnic University (PolyU) today conducted a drone performance test flight at the Shaw Sports Complex on campus, as part of the sandbox regulatory project for the low altitude economy. This successful event marks a new phase in PolyU AAE’s initiative to advance regulatory frameworks and operational standards for unmanned aerial vehicles (UAVs) in urban environments.

OHKF Releases “Taking Flight — Forging a Future for Hong Kong’s Low-Altitude Economy” Report
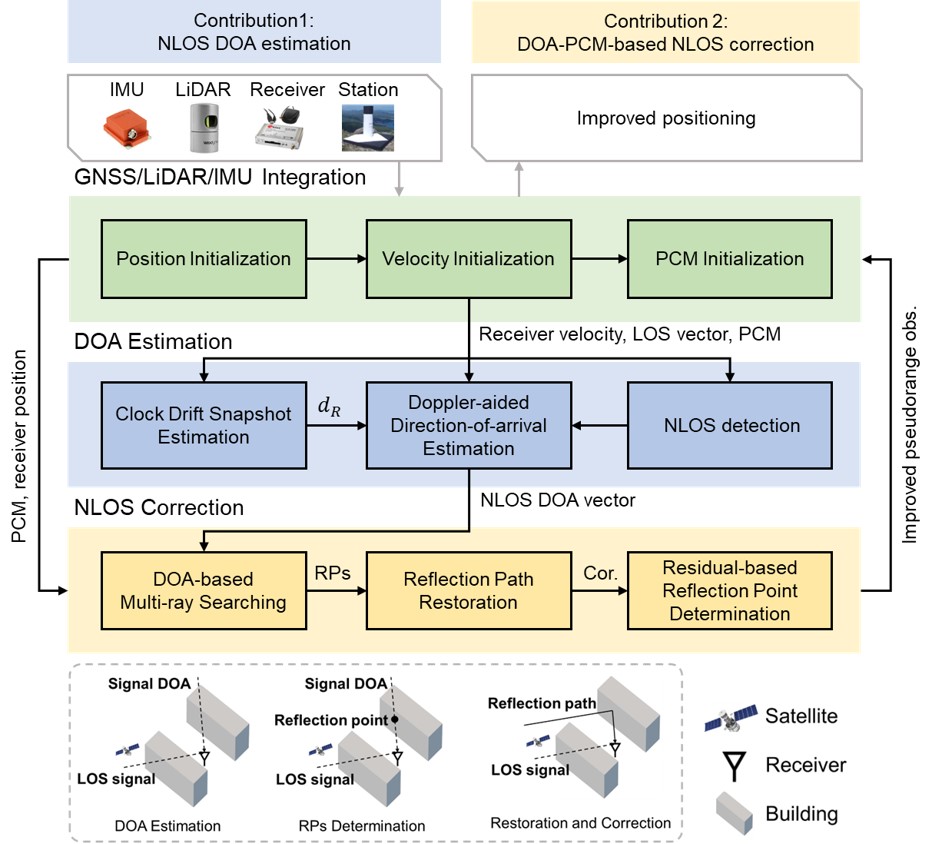
It is great to share that our paper (“3D LiDAR Aided GNSS NLOS Correction by Direction-of-Arrival Estimation Using Doppler Measurements in Urban Canyons ”, by Xikun Liu, Weisong Wen, Liyuan Zhang, and Li-Ta Hsu) is accepted by the IEEE Transactions on Intelligent Transportation Systems. Congratulations to Xikun and our collegues.

Hong Kong, September 14th, 2025 – The Hong Kong Polytechnic University (PolyU) successfully hosted the Meituan Marstalk today, bringing together leading experts in robotics, automation, and artificial intelligence to explore technological breakthroughs in intelligent systems for dynamic environments. The ceremony featured a keynote address by representatives from HKISA, who emphasized the critical role of the new index in promoting trust and scalability in commercial and civic drone applications. The index will provide a measurable framework to evaluate drone performance, maintenance standards, and operational safety—key factors for integration into urban airspace.

Hong Kong Launches Low Altitude Economy Drone Take-off Reliability Index Launching Ceremony 2025

Tas Lab and Guangzhou Aerospace Science and Technology Research Institute Hold Exchange Forum


On August 7th, 2025, with the help of Prof. Wen, PhD student Ruijie Xu and Dr. Feng Huang successfully organized the special session “Urban Navigation and Sensing for Next-Generation Smart Cities” as part of the Global Smart Cities Summit cum The 4th International Conference on Urban Informatics (GSCS & ICUI 2025). This special session was dedicated to exploring cutting-edge advances in urban navigation and sensing technologies, aiming to address the challenges of accurate localization, seamless mobility, and intelligent sensing in increasingly complex urban environments.
MTR team visited TAS-LAB
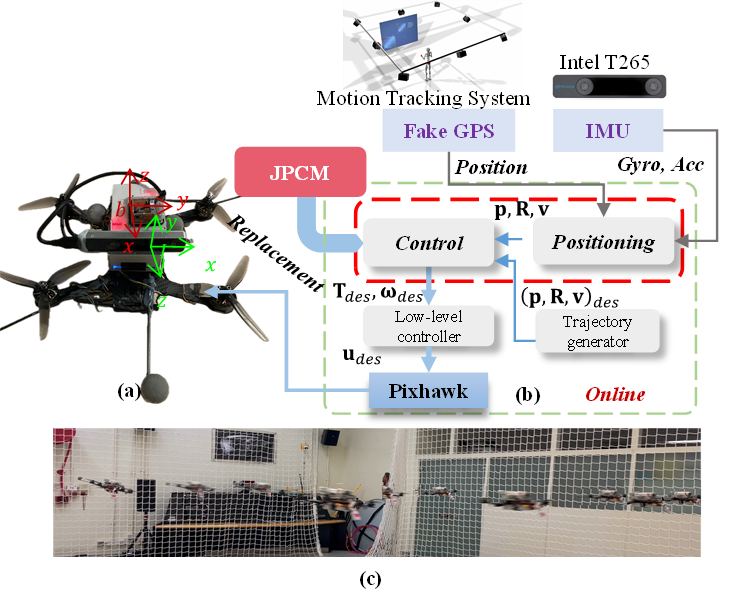
It is great to share that our paper (“Tightly Joined Positioning and Control Model for Unmanned Aerial Vehicles Based on Factor Graph Optimization”, by Peiwen Yang, Weisong Wen, Shiyu Bai, and Li-Ta Hsu) is accepted by the IEEE Transactions on Vehicular Technology. Congratulations to Peiwen., etc.

Three Papers and One Workshop are Accepted by IEEE ITSC 2025
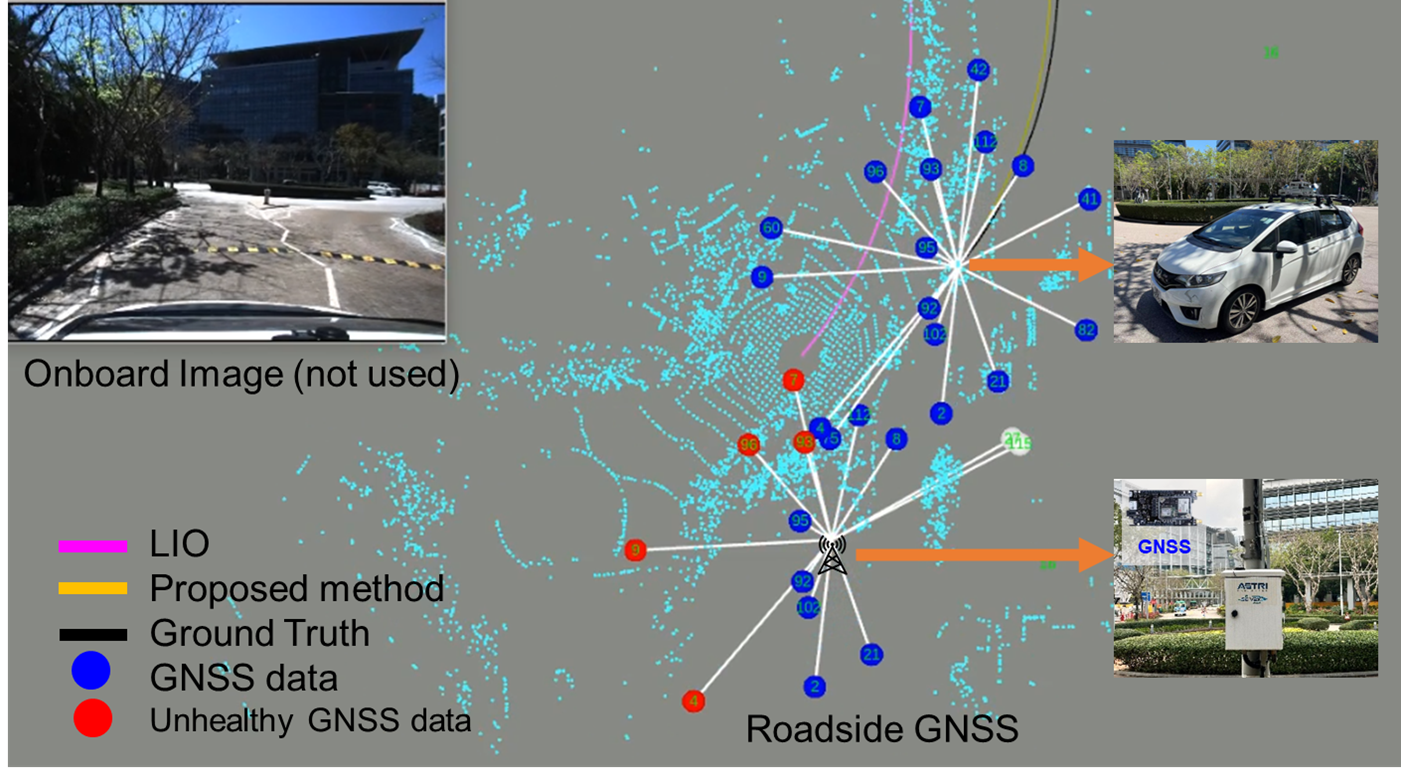
It is great to share that our paper (Roadside GNSS Aided Multi-Sensor Integrated System for Vehicle Positioning in Urban Areas”, by Feng Huang, Yihan Zhong*, Hang Chen, Dongzhe Su, Jin Wu, Weisong Wen and Li-Ta Hsu) is accepted by the IEEE IROS 2025. The data will be available at Github.

Hong Kong, 3 July 2025 – Nano Coating Tech and DRONE SOLUTIONS ASIA visited the TAS Lab at The Hong Kong Polytechnic University (PolyU) to explore collaboration opportunities and facilitate technical exchanges in the fields of UAV technology and nano-tech application. Upon arrival, the visiting team engaged in in-depth discussions with TAS Lab members. The discussions covered a range of topics, including drone cleaning applications and the potential role of nano-coating technology in building maintenance. The visit also featured outdoor testing of nano-material performance, showcasing its capabilities in real-world conditions. The visit concluded with a guided tour of the TAS Lab facilities, including the UAV flight zone, navigation testing platform, and autonomous systems testing platform. This exchange laid a solid foundation for the upcoming collaboration between PolyU, Nano Coating Tech, and DRONE SOLUTIONS ASIA.

PolyU Hosts Landmark Low Altitude Economy (LAE) Workshop, Paving the Way for Hong Kong’s Drone Innovation
PolyU Trustworthy Autonomous System Lab Member Attends Landmark Guangdong-Hong Kong Low-Altitude Economy Industry Exchange Conference

PolyU Hosts Inaugural Research Workshop on Unmanned Autonomous Systems, Fostering Global Collaboration and Innovation
Messe Frankfurt Representatives Visit TAS-Lab

Prof. Wen Meets with Dr. Yuyue Zhong to Discuss Innovations in Material Science and UAS


Prof. Weisong Wen Participates in HKGCC Panel on Low-Altitude Economy
TAS Lab Staff Visit LinxAI Intelligent Technology Co., Ltd

TAS Lab Presents Wearable Navigation Concept for Visually Impaired Individuals at Nanchang Health Expo

TAS Lab Holds Information Exchange Session with ATAL Company to Foster Industry-Academia Collaboration

THong Kong Polytechnic University Visits Hong Kong Police FDC to Enhance Collaboration on Drone Applications Hong Kong, May 27th, 2025 – A delegation from Hong Kong Polytechnic University (PolyU) TASLab recently visited the Hong Kong Police Force’s Force Drone Cadre (FDC) to discuss advancements in drone technology and explore ways to support law enforcement operations. The meeting highlighted the growing importance of unmanned aerial vehicles (UAVs) in public safety and emergency response.
Ph.D. Candidate Xikun Liu Visits the University of California, Los Angeles for Collaborative Research on Intelligent Planning for Disaster-Relief Robotics

Visiting LinxAI Intelligent Technology Co., Ltd: A Glimpse into the Future of Quadruped Robotics
It is great to share that our paper (Continuous Error Map Aided Adaptive Multi-Sensor Integration for Connected Autonomous Vehicles in Urban Scenarios”, by Huang, Feng; Wen, Weisong; Zhang, Guohao; Su, Dongzhe; Huang, Yulong) is accepted by the IEEE Transactions on Instrumentation & Measurement. Congratulations to HUANG Feng., etc. The open-source code is available at Github.

Low-altitude Economy (LAE) Exhibition 2025 Opening Ceremony at Cyberport HK

Visit to FengYi (Phoenix Wings)

Ph.D. Student XU Ruijie Presents Novel Wi-Fi RTT/LiDAR/IMU Integration Framework at IEEE/ION PLANS 2025
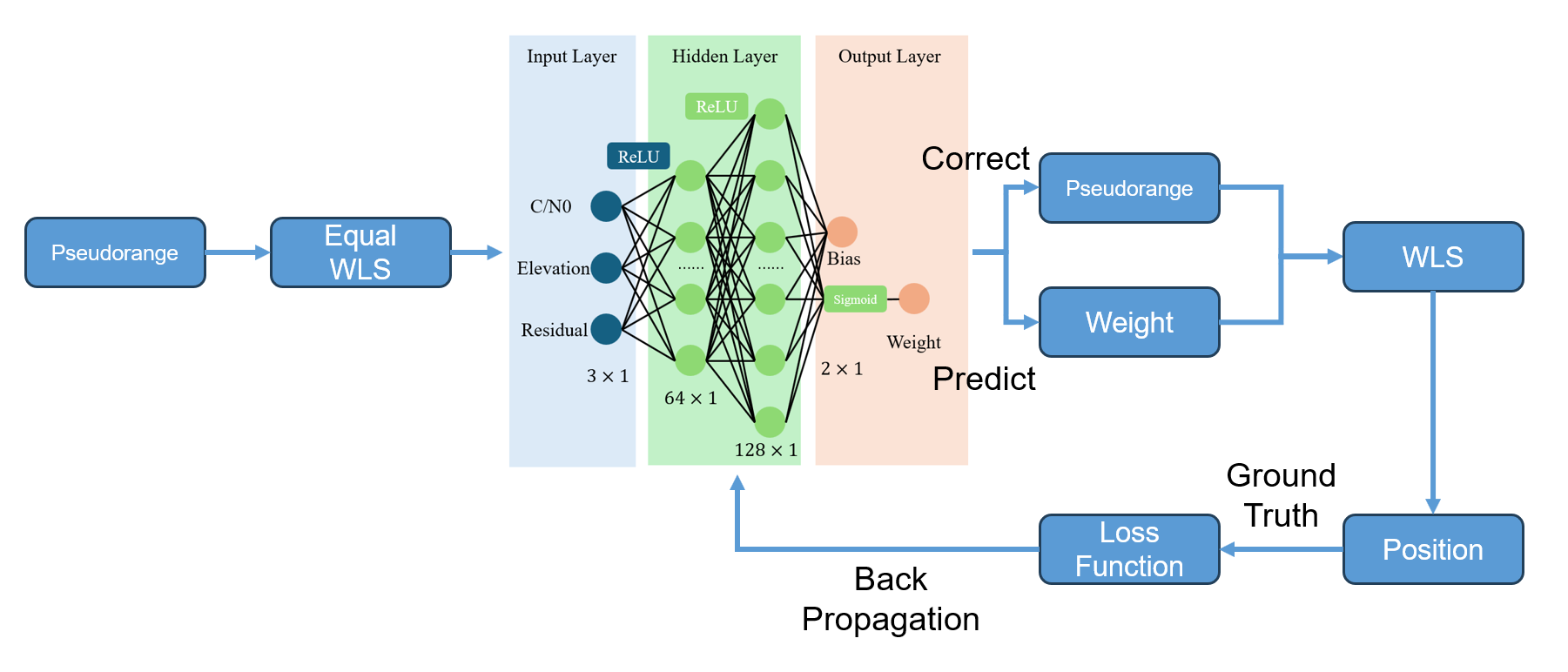
It is great to share that our paper (pyrtklib: An open-source package for tightly coupled deep learning and GNSS integration for positioning in urban canyons”, by Runzhi Hu, Penghui Xu, Yihan Zhong, Weisong Wen) is accepted by the IEEE Transactions on Intelligent Transportation Systems. Congratulations to Runzhi., etc. The open-source code is available at Github.
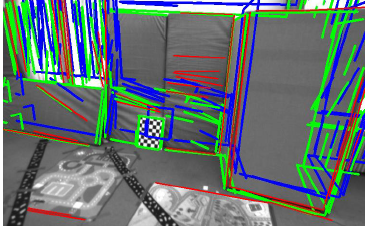
It is great to share that our paper (Safety-quantifiable Line Feature-based Monocular Visual Localization with 3D Prior Map”, by Zheng, Xi; Wen, Weisong; Hsu, Li-Ta) is accepted by the IEEE Transactions on Intelligent Transportation Systems. Congratulations to Xi Zheng., etc. The open-source code is available at Github.
Hong Kong Police Force UAV Team Visits PolyU TAS Lab to Foster Collaboration in UAV Technology and Safety

Cross-Boundary Knowledge Sharing on UAV-Enabled Inspection Technologies On April 28, 2025, The Trustworthy Autonomous Systems Lab (TAS Lab) at The Hong Kong Polytechnic University hosted an information exchange session with the Zhejiang Handover and Maintenance Engineering Branch Company and PolyU’s Department of Civil and Environmental Engineering (CEE), fostering dialogue on integrating autonomous UAV systems into next-generation infrastructure maintenance.

TASLab’s Medical Delivery Drone Project Showcased at HK SciFest, Featured by RTHK Pioneering UAV Technology for Emergency Healthcare Logistics

TASLab and FlightPro Exchange Meeting at PolyU in Advancing UAV Innovations for NextGen LAE Solution

Presenting Smart Building Cleaning UAV System at InnoEX 2025 to Jiangsu Enterprises

The First “AI4X“ International Academic Industry Conference - AI for Intelligent Systems
Ph.D. Student Runzhi Begins Research Attachment at University of New South Wales Under Leading GNSS Expert

Successfully Application on Low-altitude Sandbox Project

Visit to Jiusi’s Innovative Cleaning Drone Demonstration and Knowledge Exchange Session Academic-Industry Collaboration Explores Future of Smart City Maintenance
We are pleased to share that on March 27, 2025, our postdoctoral fellow, Dr. BAI Shiyu, representing the TAS Lab, delivered a talk at the Satellite Navigation 2025 – International Workshop for Young Scientists, held at Beihang University. He presented on Indoor Semantic Mapping and Localization Method Based On Inertial-Only Perception, highlighting TAS Lab’s research on academic indoor pedestrian localization.

Window Cleaning UAV Indoor Demonstration In the front of Secretary for Transport & Logistics

Hong Kong Polytechnic University and LinXAI Robotics establish joint lab for space robotics and embodied AI

Dr. Wen is invited to join R&D and collaboration meetings with ASTRI in Hefei.

Discussion over the LAE development in Hong Kong with CTO of the SFexpress Hong Kong, Kenny Lau at Hong Kong Polytechnic University - TASLab on Mar 14th,2025

Chairman of the PolyU Council Membership, Ir Professor H.C. MAN and Vice President in Research and Innovation visit the Hong Kong Polytechnic University - Wuxi Technology and Innovation Research Institute on Feb 23, 2025

Dr. Wen presented TAS Lab Research on LAE for HKGCC members on Feb 18, 2025
Dr. Wen is invited to the panel discussion at the ASTRI Tech Applied Summit
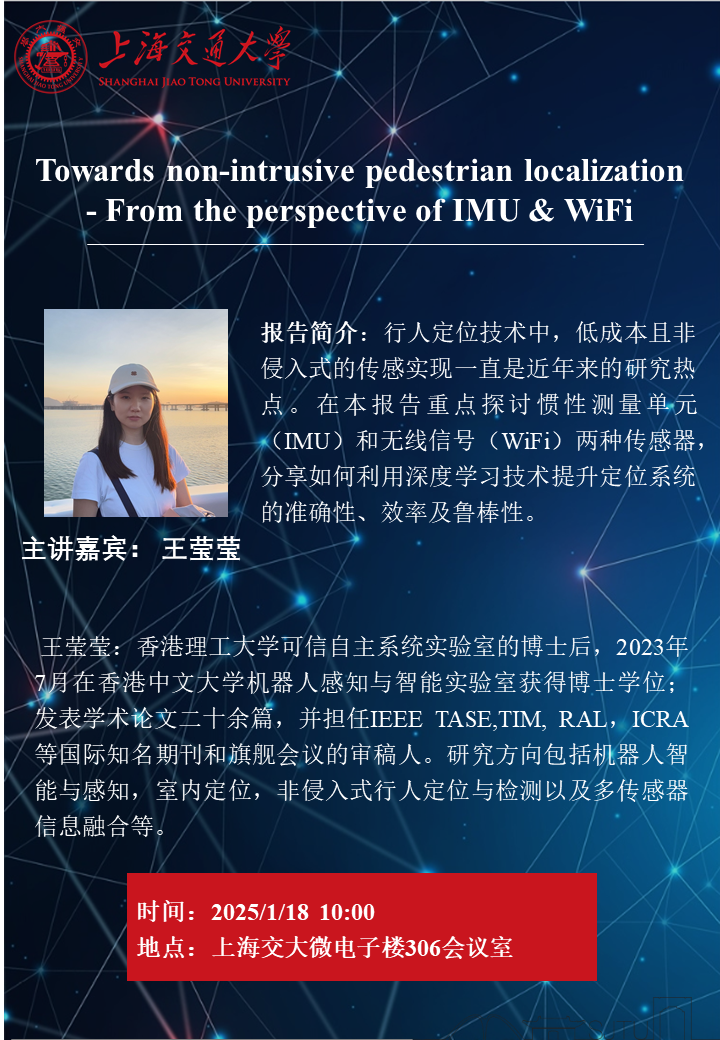
We are pleased to share that on January 18, 2025, our postdoc fellow WANG, Yingying, representing the TAS LAB, gave a talk at Shanghai Jiaotong University invited by the Institute for Sensing and Navigation. She shared non-intrusive pedestrian indoor localization research from the perspective of IMU and WiFi, especially the academic indoor pedestrian localization research in TAS LAB.

We are pleased to share with you that on January 10, 2025, our doctoral student Yang Peiwen, representing the TAS LAB of The Hong Kong Polytechnic University, gave a speech at the Hong Kong Productivity Council (香港生产力局)on the following topics: Technology Leadership: Application Prospects of Low Altitude Economy in Hong Kong by 2025. He shared the development status of the low-altitude economy, industry opportunities, and especially the current academic research in TAS LAB.

PolyU-ASTRI Showcases Innovations in Low-Altitude Economy Technologies in Shenzhen
2024 (6)

Waste Reduction for Rural Territories – Story in Sha Tau Kok

Construction of Space Stations – Introduction to Space Transportation Systems

The first event of University of Macau - Hunan University – The Hong Kong Polytechnic University Academic Salon on Autonomous Systems

A High-definition Map generation method based on the integration of semantic segmentation and SLAM algorithms was developed, providing new possibilities for large-scale data resources in intelligent transportation and autonomous driving.

Dr. Wen’s lecture at Lanzhou University, titled “3D LiDAR Aided (3DLA) Urban GNSS Positioning for Autonomous Systems in Urban Canyons”, focuses on the challenges and advancements in urban positioning for autonomous driving vehicles.